工程车360度全景可视辅助系统是由精拓公司研发,通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。行车辅助系统通过安装在车身前后左右的4个广角摄像头,同时采集车辆四周的影像,经过图像处理单元矫正和拼接后,形成一幅车辆四周的360度全景俯视图,实时传送到中控台的显示设备上。通过360度全视界鸟瞰全景行车辅助系统,驾驶员坐在车中即可直观地看到车辆所处的位置以及车辆周围的障碍物,从容操控车辆泊车入位或通过复杂路面,有效减少刮蹭、碰撞、陷落等事故的发生。工程车360度全景系统遇到障碍物可以触发全景显示。工程车360鸟瞰全景影像品牌
工程车加上360度全景影像的效果:可以随时记录工程车四周360度的实时影像。可以方便于驾驶员的特殊道路视线宽阔,可以用于事故取证,维护司机的合法权益;对不少横穿公路的人及交通工具、摩托车在道路上乱窜者,或者其它违章车辆,司机可为自己提供有效的证据,也令“撞车帮”望而却步.同时对以下问题可以有效解决:车辆监控、碰瓷讹诈、事故纠纷、难取证、路况复杂、路面狭窄、难理赔、泊车难、倒车困难、交通拥堵、行人繁多、新手上路、行车盲点、无人看车等。压路车360度全景摄像头工程车360度全景系统色彩自然。

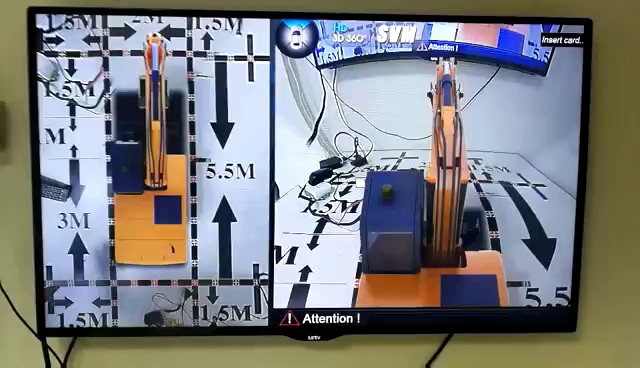
工程车360度全景影像系统的工作原理:全景环视系统,它包括有:安装于工程车四周的多个摄像头、图像采集部件、视频合成/处理部件、数字图像处理部件、车载显示器;摄像头分别拍摄工程车前后左右的图像,图像被图像采集部件转换成数字信息送至视频合成/处理部件,视频合成/处理部件处理后的图像经由数字图像处理部件处理后转换成模拟信号输出,在安装于工程车内部的车载显示器上生成工程车及其周边环境的全景图像信息。360度全景环视系统:它为工程车驾驶提供更为直观的辅助驾驶图像信息,在工程车辅助驾驶和工程车安全上有着非常好的应用前景。
360度全景环视系统的产生背景:随着图像和计算机视觉技术的快速发展,越来越多的技术被应用到工程车电子领域,传统的基于图像的倒车影像系统只在车尾安装摄像头,只可以覆盖车尾周围有限的区域,而车辆周围和车头的盲区无疑增加了安全驾驶的隐患,在狭隘拥堵的市区和停车场容易出现碰撞和刮蹭事件。为扩大驾驶员视野,就必须可以感知360度°各处的环境,这就需要多个视觉传感器的相互协同配合作用然后通过视频合成处理,形成全车周围的一整套的视频图像,就是有这类需求,全景视觉泊车辅助系统应运而生。工程车360度全景系统拼接处盲区小。

随着科技的发展,360度全景在工程车上已经非常普及了。对于新司机和女司机来说,360度全景影像很有用,特别是在复杂的路况行驶或者停车的时候,360度全景影像是有很大的帮助的。现在没有多少人停车是看后视镜或者凭感觉了,基本都是看倒车影像或者全景影像,车辆在行驶过程中难免会出现一些视线盲区和擦碰,技术稍微差一点就很难避免,特别是车头车尾盲区、后视镜盲区,这些盲区会导致车主在行车时的安全出现问题;而360度全景影像前后有4个广角摄像头,还可以进行视角切换,很好地去除了视野盲区,都为我们行驶或者倒车的过程中提供了便利。工程车360全景系统画面稳定。吊车360环影系统
工程车360全景系统的选购需要考虑人机交互操控的多样性。工程车360鸟瞰全景影像品牌
给工程车安装360度全景的原因:避免A柱盲区:前挡风玻璃两侧的斜柱叫A柱。拐弯时产生盲区。如果安装了360度全景行车辅助系统,可以很好的解决因为A柱遮挡视线而产生的盲区。我们的360度全景通过高清摄像头将车前方的影像显示在中控台上。车前的路况一目了然。若未安装,一定要减速慢行,留意前方,确认好再拐弯。避免内轮差盲区:拐弯时,前内轮转弯半径与后内轮转弯半径之差,形成盲区。现在我们开发出像大货车这种大型车的360度全景。虽然大货车有了这套行车安全辅助系统,还是要提醒:行人和车辆应该远离2米以上的距离。工程车360鸟瞰全景影像品牌