- 品牌
- 丰烨
- 型号
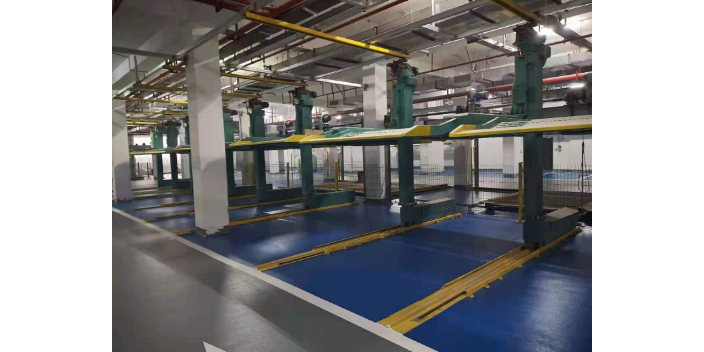
- 升降横移、平面移动、垂直升降、简易升降、垂直循环
转动轴3带动两个连接块5转动,两个连接块5带动两个三角斜板6转动收起,使两个三角斜板6与两个车后轮7接触,防止车后退,通过两个齿轮14的转动带动两个齿条18移动,两个齿条18带动两个滑板15移动,两个滑板15带动一个后轮固定块16和一个前轮固定块17移动,两个滑板15的移动使两个螺杆20转动,由于两个一螺纹槽21与两个第二螺纹槽的螺纹旋向相反,所以两个螺杆20的转动使另外两个滑板15朝着与前两个滑板15相反的方向移动,从而使两个前轮固定块17相互靠近,两个后轮固定块16相互靠近,两个前轮固定块17对两个车前轮8进行夹持,两个后轮固定块16对两个车后轮7进行夹持,防止车侧移。以上所述,只为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。我们这里是一家专业的立体停车设备厂家,想要订购产品的朋友可以联系我们。温州地下停车设备

链条5转动带动两个主齿轮64进行转动,主齿轮64转动带动副齿轮65转动,通过副齿轮65与齿轮板69的啮合,使齿轮板69在板孔12内进行滑动,齿轮板69滑动带动推动板68进行收缩,滑台1下降时将推动板68推动远离支撑柱22,推动板68将滑台1下方的物体推动出去,有着防止滑台1下方的物体对滑台1进行阻隔造成使用者上车不方便、防止滑台1和上车台3受到损伤导致设备寿命降低以及动物、儿童等出现在滑台1下的视野范围外导致安全隐患等好处。在使用时,车辆通过上车台3驶入后,通过油缸4对链条5进行顶升,链条5顶升带动滑台1上升,滑台1通过导向轮8在两个支撑柱22之间上下滑动,将汽车提起后通过锁紧装置将滑台1的位置进行锁定,滑台1提升时连接板9随着滑台1进行提升,连接板9带动推动杆62对链条5进行推动,链条5转动带动两个主齿轮64进行转动,主齿轮64转动带动副齿轮65转动,通过副齿轮65与齿轮板69的啮合,使齿轮板69在板孔12内进行滑动,齿轮板69滑动带动推动板68进行收缩,滑台1下降时将推动板68推动远离支撑柱22,推动板68将滑台1下方的物体推动出去。尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言。新疆升降横移停车设备维保关于立体停车设备的基本信息来这里都是可以咨询的。

防坠挂钩30还是保持挂设在防坠座50,实现平层与防坠功能。只有在控制电机20驱动输出杆21移动并使自锁连杆40切换至可移动位40b时,自锁连杆40才能移动,并让防坠挂钩30分离于防坠座50,实现升降轿厢200的移动。在本实用新型另一实施例中,控制电机20安装于安装底座10。在装配时,直接把安装底座10安装于升降轿厢200即可,容易装配。在本实用新型另一实施例中,控制电机20可以为步进电机或其它控制电机20,便于准确控制输出杆21的位移。具体地,在控制电机20为直线步进电机时,输出杆21输出直线位移。采用步进电机后,通过脉冲信号对步进电机精细控制,从而实现对行程的精确控制,让自锁连杆40在自锁位40a与可移动位40b之间可靠切换。在本实用新型另一实施例中,输出杆21与自锁连杆40之间通过一销轴61枢接;自锁连杆40与防坠挂钩30之间通过第二销轴62枢接。采用销轴穿过两个结构件,实现两个结构件枢接与力的传递。在控制电机20输出杆21移动时,自锁连杆40与防坠挂钩30跟随移动,使防坠挂钩30打开和关闭,保证开闭运作的可靠性,实现了对防坠挂钩30打开与关闭动作的高精度控制。在本实用新型另一实施例中,安装底座10连接有固定板70,防坠挂钩30枢接于固定板70。
自锁连杆40的长度方向同时垂直于输出杆21的长度方向与防坠挂钩30的长度方向;在自锁连杆40处于可移动位40b时,防坠挂钩30分离于防坠座50。在使用时,将安装底座10安装在升降轿厢200,将防坠座50安装在平层处即可,安装方便。控制电机20的输出杆21、自锁连杆40、防坠挂钩30依次枢接,防坠挂钩30铰接于安装底座10。采用控制电机20驱动输出杆21移动,自锁连杆40与防坠挂钩30联动,自锁连杆40在自锁位40a与可移动位40b之间切换,相应地,防坠挂钩30挂设或分离于防坠座50,实现防坠挂钩30的高精度控制。当升降轿厢200到达目的层时,使防坠挂钩30挂设在防坠座50,实现平层。同时自锁连杆40处于机械自锁位40a,即使此时断电或是出现其它故障情况,防坠挂钩30保持挂设在防坠座50,实现防坠功能,保证升降轿厢200安全。当升降轿厢200准备移动至其它位置时,可以在不微升的情况下,使防坠挂钩30分离于防坠座50,减少设备运作,节省时间并减少故障点,安全可靠、经济又节能。具体地,在控制电机20驱动输出杆21移动并使自锁连杆40处于自锁位40a时,自锁连杆40的长度方向同时垂直于输出杆21的长度方向与防坠挂钩30的长度方向,即使断电或防坠挂钩30受到外力作用。一方面工作人员工作量减少,另一方面钱往来也很明显。

响应速度会比较慢。人用手来拉放手刹的时间大概不超过,而且人控比电控更灵活一些,而启动电子手刹需要有一个踩刹车的前提动作,和按键的响应时间(避免误操作),而且电机运行的时间也偏长,约。即便是踩油门时,电子手刹自动解除,这个动作也未免有些突兀,所以自动驻车系统的功能实现是另外一种原理。自动驻车系统的工作原理在于:刹车管理系统通过电子手刹(EPB)的扩展功能来实现的对四轮刹车的控制。或者说,自动驻车系统是电子手刹(EPB)的一种扩展功能,由ESP部件控制。当车辆临时停驻,并且在很短一段时间之后就需要重新起动时,驻车就交由ESP控制的刹车来完成,电脑会通过一系列传感器来测量车身的水平度和车轮的扭矩,对车辆溜动趋势做一个判定,并对车轮实施一个适当的刹车力度,使车辆静止。这个刹车力度刚好可以阻止车辆移动,并不会太大,以便再次踩油门前行时,不会有太严重的前窜动作。而在临时驻车超过一定时限后,刹车系统会转为后轮机械驻车(打开电子手刹),来代替之前的四轮液压制动。当车辆欲将前行时,电子系统会检测油门的力度,以及手动挡车型的离合器踏板的行程,来判定刹车是否解除。自动驻车系统系统功能很多中轿车都有了这个功能。了解了这些以后起码在采购的时候不会轻易被销售人员忽视的。升降横移类立体停车设备价格多少
我们在这里说的也都是关于立体停车设备的一些优势。温州地下停车设备
本实施例的前吊点防松检测装置7,滚轮72置于钢丝绳上,通过滚轮72使摆臂71保持静止状态,在载车板4升降时,滚轮72与钢丝绳之间为滚动摩擦,不至于增大摩擦力而影响寿命,只要钢丝绳保持张紧状态,摆臂71的运动状态就不会发生变化,当钢丝绳松弛后,钢丝绳不再支撑滚轮72,也就不再保持摆臂71的位置状态,摆臂71在重力作用下一端下落,由于限位开关74的触发端位于摆臂71下落的路径上,因此摆臂71下落必然会触碰到触发端,从而触发信号控制升降传动机构3及时停止,本实施例的前吊点防松检测装置7,通过机械传递的方式,可以及时检测到钢丝绳松紧状态的变化,不受光线湿度等环境因素的影响,且前吊点防松检测装置7设于支撑轮和升降传动机构3间,前吊点处钢丝绳的摆动影响可以被支撑轮消除,因此检测准确性和及时性高。实施例5本实施例的松动自检立体停车设备,在实施例1~4的基础上做进一步改进,所述后吊点防松检测装置6和前吊点防松检测装置7各为两个。本实施例于连接四处吊点的钢丝绳上均设有防松检测机构,每处钢丝绳的松紧状态均能有效检测,进一步保证检测的及时性,增加安全性能。实施例6如图2和图7所示,本实施例的松动自检立体停车设备。温州地下停车设备
江苏丰烨驻车系统有限公司是一家有着雄厚实力背景、信誉可靠、励精图治、展望未来、有梦想有目标,有组织有体系的公司,坚持于带领员工在未来的道路上大放光明,携手共画蓝图,在江苏省等地区的机械及行业设备行业中积累了大批忠诚的客户粉丝源,也收获了良好的用户口碑,为公司的发展奠定的良好的行业基础,也希望未来公司能成为*****,努力为行业领域的发展奉献出自己的一份力量,我们相信精益求精的工作态度和不断的完善创新理念以及自强不息,斗志昂扬的的企业精神将**江苏丰烨驻车系统供应和您一起携手步入辉煌,共创佳绩,一直以来,公司贯彻执行科学管理、创新发展、诚实守信的方针,员工精诚努力,协同奋取,以品质、服务来赢得市场,我们一直在路上!


- 上海升降式地下立体停车设备价格多少 2026-05-04
- 多层升降停车设备哪家好 2026-05-03
- 上海三层升降横移立体停车设备造价 2026-05-02
- 上海两层升降横移式立体停车设备生产厂家 2026-04-30
- 西安地坑升降停车设备报价 2026-04-30
- 无锡垂直升降式智能停车设备设计 2026-04-29
- 3层升降横移立体停车设备生产厂家 2026-04-28
- 新疆立体升降停车设备厂家 2026-04-27