- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
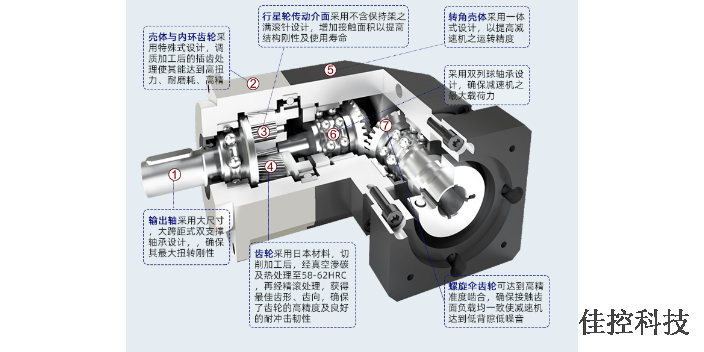
联轴器同轴的过盈配合当轴断裂部位正好是联轴器同轴过盈配合的边缘处,过盈配合对轴的强度影响很大。可见:过盈配合H7/r6的应力集中系数可达2.2以上;过盈配合H7/k6的应力集中系数约为1.77;高速轴常用的过盈配合H7/m6的应力集中系数不会小于1.8。因此,高速轴就容易在联轴器与轴过盈配合边缘处断裂了。过盈连接的应力集中和接触应力分布实例如图7所示。值得注意的是,以上原因之一(键槽应力集中)和原因之二(过盈连接应力集中)虽然对高速轴的强度有影响,但是两者在轴的强度设计和安全系数计算中都已经涉及的因素,因此可以肯定,两者都不是造成轴容易断裂的决定性原因。既有箱体底脚又有安装法兰的产品在安装中严防互相较劲。宝山区转角高精密减速机供应
对于减速机的选择,除了上述的参数选择,还要对减速机的类型和安装方式进行选择,例如你选择的减速机是行星减速机,还是蜗轮蜗杆减速机,是同轴直联式,还是90度垂直安装等等。特别是对于蜗轮蜗杆减速机的选择,有其特定的应用场景,例如要求整个运动机构具备自锁功能,我们很多时候都有这样的设计需求,例如传动机构是垂直安装的时候,为了避免机构在电机断电后下坠,通常我们选择蜗轮蜗杆式的减速机。当然很多人会抬杠说可以选择带抱闸的伺服电机,其实理论上是可以的,而且通常垂直方向的伺服电机我们都会选择抱闸电机,但是我们在实际的应用中会发现,伺服电机在通电的瞬间很多机构会出现微量下坠的现象,如果这个时候你选择的是蜗轮蜗杆的减速机,那就可以很好的避免这样的现象,因为蜗轮蜗杆的减速机是带自锁功能的。当然这个自锁是有前提的,传动比要大于一定的比值,蜗轮蜗杆的减速机才能真正起到自锁的作用,减速比太小依然是不可靠的,具体的比值我忘记了(好像是要超过30,不确定),在使用的时候可以和减速机厂家好好的沟通一下,他们有相关参数的。所以选择什么样的型号的安装方式也很重要,并不是随心所欲的去做选择的。闵行区齿轮减速机产品介绍蜗轮减速机为了提高效率,一般均采用有色金属做蜗轮,蜗杆则采用较硬的钢材,由于它是滑动磨擦传动。
今工业机器人的先进程度让人叹为观止,尤其是那些灵动的5轴、6轴机器人,具有如此多的关节,还能够做到运动和指令的精确传输,各部位紧密配合完成复杂的工作,让人不禁好奇它们的传动系统到底是怎样的???真正的工业机器人关节到底是什么结构的呢?说起关节,主要是指工业机器人重要的基础部件,也是运动的部件:精密减速机。这是一种精密的动力传达机构,其利用齿轮的速度转换器,将电机的回转数减速到所要的回转数,并得到较大转矩的装置,从而降低转速,增加转矩。
先将差速器轴承调整螺母按相对方向调紧,直到差速器轴承不能转动为止,或在半浮式后桥壳差速器轴承止推面底部加足垫圈,以不让差速器抽承转动为止。然后以0.05-0.08毫米薄厚的垫片逐渐拆垫或松动螺母,使差速器在其位置上转动自如,达到用手拨转一次能转1-2转为好。但必须注意,应以差速器轴承盖或半浮式后桥壳紧固后的轴承间隙为准。如果用调整螺母的方法调整好的轴承间隙,在紧固差速器轴承盖后轴承间隙出现变化,轴承不能转动,这是轴承外套受轴承盖压力的原因。节省空间,可靠耐用,承受过载能力高,功率可达95KW以上;

行星减速机原理精密,混合驱动设备是一种高精度设备,提高行星减速机的工作精度至关重要。但由于工作设备的限制,制造精度的提高有限,成本会增加。在内磨头(电主轴)中,已经采用了向径向推力球轴承施加预紧力来提高精度的方法。现在把这个原理应用到行星减速机上,通过偏心行星轴对啮合齿面施加预紧力来提高传动精度。根据行星减速机混合驱动系统的特点,采用行星传动作为减速机混合驱动系统速度合成的新方法,并详细介绍了其结构设计、受力分析、功率分配和安装方法。实践证明,它具有线性增量简单、综合精度高的优点。利用偏心行星轴在对称行星减速机的啮合齿面间产生预紧力的方法,可以提高传动精度,降低系统成本,行星轴偏心量的计算值可以很好地保证齿间侧隙的消除。能耗低,性能优越,减速机效率高达95%以上;闵行区齿轮减速机产品介绍
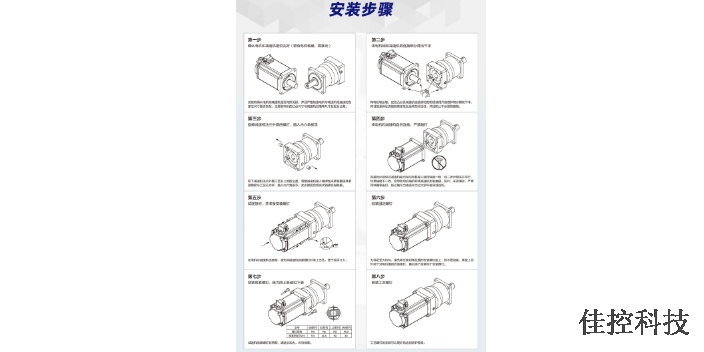
安装锁紧须牢固可靠,不得在工作中产生位移。宝山区转角高精密减速机供应
从成本上来说,目前全球机器人产业的成本构成,35%左右是减速器,20%左右是伺服电机,15%左右是控制系统,机械加工本体可能只占15%左右,其他的部分主要就是应用。可以看出,减速器是制约机器人产业发展的关键因素。目前中国机器人的技术上还缺乏整体的突破。关键部件进口比例较高,就会导致国内制造机器人成本高。特别是减速器,国内企业购买减速器的价格是国外企业的价格的将近数倍。这样国产机器人难以形成价格优势,只有年产量上500-1000台,才有一定的规模效应。因此,中国如果想要形成机器人产业化,摆脱国外机器人企业的掣肘,在机器人领域赢得自主,必须要将减速器国产化加速提上日程。宝山区转角高精密减速机供应
- 静安区现代化减速机供应 2026-03-04
- 青浦区齿轮减速机产品介绍 2026-03-04
- 宝山区减速机厂家供应 2026-03-04
- 奉贤区转角高精密减速机现价 2026-03-03
- 长宁区K系列螺旋锥齿轮减速机供应 2026-03-03
- 金山区高精密减速机哪里好 2026-03-03
- 浙江专业减速机排行榜 2026-03-03
- 黄浦区现代化减速机厂家供应 2026-03-03
- 徐汇区减速机大概多少钱 2026-03-03
- 浦东新区K系列螺旋锥齿轮减速机厂家供应 2026-03-03
- 浦东新区精密型减速机品牌 2026-03-03
- 杨浦区齿轮减速机现价 2026-03-03