- 品牌
- 佳控科技
- 型号
- --
- 类型
- 齿轮-蜗杆减速器,蜗杆减速器,摆线减速器,摆线针轮减速器,行星齿轮减速器,圆柱齿轮减速器,无级减速器,谐波减速器
- 载荷状态
- 均匀载荷,强冲击载荷
中国的机器人关节用高精密减速机研发起步较晚,再加上相关技术封锁等原因,与精度、噪声、寿命相关的**技术成为卡脖子难题。但随着中国逐步将突破机器人关键**技术列入国家战略规划,外部环境变化下资本更多的加持,以及相关理论与技术原理的逐步攻克,这一局面正在发生改变。国内的工业机器人用减速机制造商**多时曾经多达50家,但大多采用逆向测绘仿制的技术路线,相关产品性能不高。因此,随着精密减速机市场的不断竞争与演进,目前行业内具备精密减速机设计研发制造能力的厂商*剩余4-5家。由于齿轮一般采用20CRMNTI材料制成,运转时速度又非常高,一般能达到1500转左右。闵行区高精密减速机产品介绍
测量轴承座处的振动可获得测点处的振动烈度值,由于测得的振动值是一***量,试验的支承结构比较好为可以看作是固定的基础结构。试验时,至少在试验的速度范围内,必须避免支承结构的共振。测得的振动烈度是齿轮装置转动部分和支承箱体动态耦合的函数。在使用滚动轴承时耦合是非常直接的,使用滑动轴承时,由于油膜的阻尼作用,轴的振动或多或少的受到抑制。滑动轴承受速度、扭矩、载荷以及润滑油的影响教大,评价轴承座的振动烈度时,必须考虑这些变化因素的影响。(一般有不平衡和偏心引起)可能还不会强烈的传递到齿轮装置的轴承座上,但在重载条件下,这些振动传递的强度可能很高。此外,由于齿轮啮合引起的高频振动也会强烈的传递到轴承座上并且在测得的箱体振动信号中在支配地位。浦东新区精密减速机哪个好齿轮减速电机按国家专业标准ZBJ19004生产技术要求制造,具有很高的科技含量;
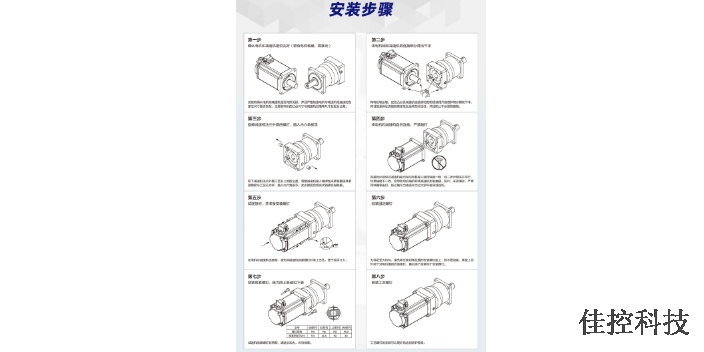
减速机选型,是每个机械设计工程师的必修课。因此我们下面就结合减速机的选型样本来介绍一下,减速机的选型注意事项。其实,在减速机的选型过程中,我们需要特别注意的是以下几个参数的选择与计算:A、减速机输出轴扭矩的计算;B、传动机构的比较大速度的计算;C、传动机构的安装方式的选择;D、减速机传动精度的选择;F、减速机接口的配置;接下来就从以上几个方面来详细的介绍一下,减速机过程中的选择依据和方法。减速机的输出扭矩,即是我们对传动机构计算得出的需求扭矩,你选择减速机的目的就是希望:电机额定扭矩小化(也即成本小化)+减速机(增大扭矩)=得到一个较大的扭矩输出。其实,减速机在机械结构中的应用好处有很多,例如增大扭矩,减小惯量,减小传动机构对伺服电机的冲击,自锁传动机构等等。
减速机在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,减速机是一种相对精密的机械,使用它的目的是降低转速,增加转矩。按照传动级数不同可分为单级和多级减速机;按照齿厂轮形状可分为圆柱齿轮减速机、圆锥齿轮减速机和圆锥-圆柱齿引轮减速机;按照传动的布置形式又可分为展开式、分流式和同进轴式减速机。减速器是一种由封闭在刚性壳体内的齿轮传动、蜗杆传动、齿轮-蜗杆传动所组成的**部件,常用作原动件与工作机之间的减速传动装置。在原动机和工作机或执行机构之间起匹配转速和传递转矩的作用,在现代机械中应用极为***。电动机的使用和维护要按照电动机的使用说明书进行。

步进电机减速机错位是指什么?步进电机减速机错位即是失步,失步分为丢步和越步。步进电动机正常工作时,每接收一个控制脉冲就移动一个步距角,即前进一步。若连续地输入控制脉冲,电动机就相应地连续转动。丢步时,转子前进的步数小于脉冲数;越步时,转子前进的步数多于脉冲数。一次丢步和越步的步距数等于运行拍数的整数倍。丢步严重时,将使转子停留在一个位置上或围绕一个位置振动,越步严重时,拖动结构将发生过冲。关于步进电机减速机丢步和失步的分析:步进电机减速机选型不当,电机力矩不够或者物体运动的惯量超过电机自锁力,造成的丢步或失步。驱动器选型不当,配套的驱动器电流偏小,影响电机正常运转,现在市面上很多电流虚标的驱动器,拿峰值电流当额定电流来忽悠消费者,驱动器选型额定电流应大于步进电机减速机额定电流的1.2-1.5倍。配套电源选型不当,配套电源应是驱动器额定电源的1.5-2倍,电源虚标比驱动器虚标更严重。控制部分应排除干扰,远离变频器,防静电。振动小,噪音低,节能高,选用质量段钢材料,钢性铸铁箱体,齿轮表面经过高频热处理;崇明区涡轮蜗杆减速机品牌
不同品质的润滑油要注意,是不能混合使用的。闵行区高精密减速机产品介绍
先将差速器轴承调整螺母按相对方向调紧,直到差速器轴承不能转动为止,或在半浮式后桥壳差速器轴承止推面底部加足垫圈,以不让差速器抽承转动为止。然后以0.05-0.08毫米薄厚的垫片逐渐拆垫或松动螺母,使差速器在其位置上转动自如,达到用手拨转一次能转1-2转为好。但必须注意,应以差速器轴承盖或半浮式后桥壳紧固后的轴承间隙为准。如果用调整螺母的方法调整好的轴承间隙,在紧固差速器轴承盖后轴承间隙出现变化,轴承不能转动,这是轴承外套受轴承盖压力的原因。闵行区高精密减速机产品介绍
- 杨浦区高精密减速机哪个好 2024-11-30
- 杨浦区专业减速机 2024-11-30
- 黄浦区高精密减速机品牌 2024-11-30
- 宝山区高精密减速机哪个好 2024-11-30
- 宝山区转角高精密减速机 2024-11-30
- 长宁区减速机大概多少钱 2024-11-30
- 虹口区齿轮减速机产品介绍 2024-11-30
- 金山区高精密减速机哪里好 2024-11-30
- 黄浦区专业减速机产品介绍 2024-11-30
- 宝山区现代化减速机排行榜 2024-11-30
- 上海专业减速机品牌 2024-11-30
- 奉贤区高精密减速机产品介绍 2024-11-30


