车侣DSMS疲劳驾驶预警系统可以根据驾驶员的个人习惯进行调整和个性化设置。以下是一些常见的调整方法:1.训练期:在系统开始使用之前,可能需要一个训练期来收集驾驶员的数据并建立驾驶员的个人行为模式。这个训练期可以用于校准系统以更好地适应驾驶员的行为。2.灵敏度调节:疲劳驾驶预警系统通常提供了调节灵敏度的选项。驾驶员可以根据自己的个人习惯和感觉,设置系统的灵敏度,以确保预警系统在适当的时间发出警报,避免过度或不足的警报。3.个性化设置:一些系统提供个性化的设置,驾驶员可以根据自己的需求和偏好进行调整。例如,可以设置警报方式(声音、震动、提示灯等)和警报的阈值等。4.实时反馈:一些系统可以提供实时的反馈信息,如驾驶行为分析、驾驶时间推荐等。通过观察和分析这些信息,驾驶员可以了解自己的驾驶状态并作出相应的调整或休息。请注意,调整疲劳驾驶预警系统是一个个性化的过程,驾驶员应根据自身情况和需求进行设置。建议在实际使用中尽可能地与系统配合,并根据个人的实际反馈和体验来调整系统以达到更好的效果。 车侣DSMS疲劳驾驶预警系统的安装视频有吗?河南AI疲劳驾驶预警系统
目前疲劳驾驶预警系统主要存在以下明显的技术缺陷:GPS计算的驾驶时间不科学、不合理、不准确。目前的系统无法精确地监控某个驾驶员的累计驾驶时间,这可能导致对驾驶时间过长的驾驶员无法做出及时的疲劳驾驶预警,给驾驶员和企业都可能留下造假的空间。视频监控系统的缺陷。虽然视频监控系统可以记录驾驶员的驾驶过程,但管理者只能在事后对少部分视频进行抽查、分析,对查到的问题进行整改,无法做到全过程监控。传感器技术的限制。比如基于车辆行驶状态检测的方法,虽然可以通过传感器实时检测驾驶员施加在方向盘的力来判断驾驶员的疲劳程度,但由于传感器技术的限制,其准确度有待提高。同时,这种方法还受到车辆的具体情况、道路的具体情况以及驾驶员的驾驶习惯经验和条件的限制,测量的准确性并不高。以上是目前疲劳驾驶预警系统的主要技术缺陷,不过随着技术的不断进步,这些问题有望得到逐步解决。 广西疲劳驾驶预警系统定制开发车侣DSMS疲劳驾驶预警系统在公交领域应用效果怎么样?

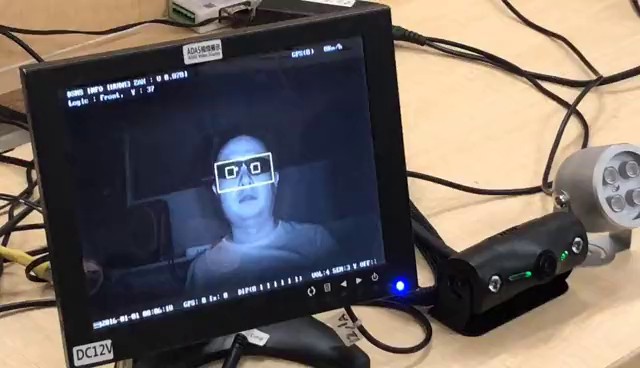
疲劳驾驶系统可以提高道路交通的安全性,主要通过以下几个方面:疲劳检测和预警:疲劳驾驶系统可以通过传感器和算法分析驾驶员的行为和生理特征,如眼睛状态、头部姿势、方向盘操作等。当系统检测到驾驶员出现疲劳迹象时,及时发出警报提醒驾驶员休息或采取措施。这可以帮助驾驶员及时意识到自己的疲劳状态,避免发生疲劳驾驶引发的事故。提供驾驶辅助功能:一些疲劳驾驶系统不仅能够检测疲劳状态,还提供多种驾驶辅助功能,如自动紧急制动、车道保持辅助、自适应巡航控制等。这些功能可以在驾驶员疲劳或无法及时反应时自动采取行动,减少事故风险和碰撞的严重程度。数据分析和驾驶行为评估:疲劳驾驶系统通常会收集和分析驾驶数据,例如驾驶时间、速度、车道偏离等。这些数据可以用于评估驾驶行为的安全性,并提供驾驶员行为的反馈。驾驶员可以根据系统的评估结果和建议,调整自己的驾驶习惯,降低事故风险。意识提醒和教育驾驶员:疲劳驾驶系统可以通过警报、语音提示等方式提醒驾驶员注意驾驶安全,增强对驾驶风险的意识。此外,系统还可以提供有关疲劳驾驶的教育内容,如提示驾驶员保持充足的睡眠、合理安排驾驶时间等,以帮助驾驶员更好地预防疲劳驾驶。
目前技术可以改进的疲劳驾驶预警系统主要有以下几种:硬件基础技术的突破:随着科学技术不断发展,硬件基础技术可以进一步提高系统的性能和稳定性,例如采用更精确的传感器,更高效的计算芯片等。车载传感器技术的改进:车载传感器技术是疲劳驾驶预警系统的重要组成部分,改进车载传感器技术可以提高系统对驾驶员状态的监测和判断的准确性。例如,使用更先进的生物特征识别技术,如人脸识别、眼部动态监测等,可以更准确地捕捉驾驶员的疲劳状态。人工智能算法的应用:人工智能算法可以通过对大量数据的分析处理,提高系统的智能性和自适应性。例如,利用深度学习算法训练模型,让系统能够自动学习和识别驾驶员的疲劳状态,从而提高预警的准确性和实时性。云计算技术的应用:云计算技术可以实现大规模数据共享、实时数据分析等功能,使得预警系统能够实时监测驾驶行为,及时发出预警信号,提高预警的准确性和实时性。软件算法的发展:随着软件算法的不断进步,可以引入更多先进的技术和方法,例如机器学习算法、模式识别技术等,从而进一步提高系统的性能和准确性。综上所述,疲劳驾驶预警系统的技术改进可以从硬件、算法等多个方面进行,随着技术的不断发展。 疲劳驾驶预警系统的技术原理。

计算疲劳驾驶预警系统的准确率通常涉及对系统预测结果的评估。准确率是衡量一个分类系统性能的重要指标,它表示系统正确预测的样本数占总样本数的比例。在疲劳驾驶预警系统的上下文中,准确率可以通过以下公式计算:准确率(Accuracy)=TP+TN+FP+FNTP+TN其中:TP(TruePositives):系统正确预测为疲劳驾驶的样本数。TN(TrueNegatives):系统正确预测为非疲劳驾驶的样本数。FP(FalsePositives):系统错误预测为疲劳驾驶的样本数(实际上是非疲劳驾驶)。FN(FalseNegatives):系统错误预测为非疲劳驾驶的样本数(实际上是疲劳驾驶)。要计算准确率,你需要有一个标注好的测试数据集,其中包含每个样本的真实标签(疲劳驾驶或非疲劳驾驶)以及系统的预测标签。然后,你可以通过比较真实标签和预测标签来统计TP、TN、FP和FN的数量,并使用上述公式计算准确率。需要注意的是,准确率并不是评估分类系统性能的w一指标。其他常用的指标还包括查准率(Precision)和查全率(Recall),它们可以提供更全M的性能评估。在疲劳驾驶预警系统中,这些指标的具体定义和计算方法可能会根据具体的应用场景和需求而有所不同。车侣DSMS疲劳驾驶预警系统在安装注意事项有哪些?河南AI疲劳驾驶预警系统
怎么计算疲劳驾驶预警系统的准确率?河南AI疲劳驾驶预警系统
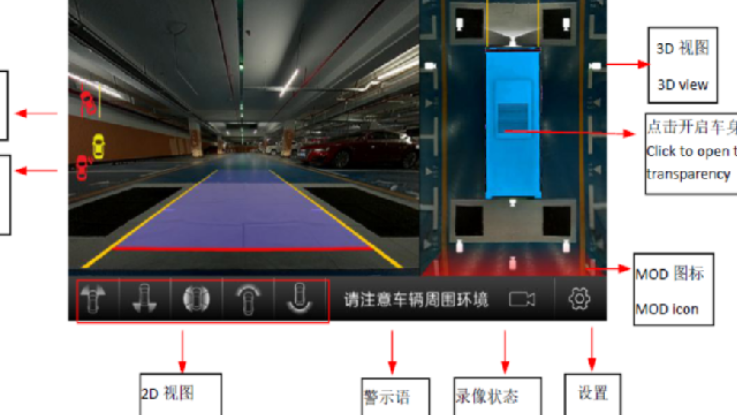
车侣DSMS疲劳驾驶预警系统集成盲区预警的意义在于提高驾驶安全性,减少因盲区导致的碰撞和刮擦事故。车辆盲区是指驾驶员在正常驾驶位置无法看到的区域,包括前盲区、后盲区、侧盲区和AB柱盲区等。由于驾驶员无法直接观察到这些区域内的物体,因此很容易导致交通事故的发生。疲劳驾驶预警系统集成盲区预警功能,可以通过车辆前视图车载夜视辅助驾驶系统和周视车身盲点监测系统监控盲区,当检测到盲区内出现障碍物或车辆时,及时向驾驶员告警,同时提供相应的预警提示,以便驾驶员及时采取相应措施,避免碰撞和刮擦事故的发生。此外,疲劳驾驶预警系统还可以通过其他传感器和检测方法,如驾驶员面部表情、眼部信号、头部运动性等生理特征的检测,以及车辆状态信息的监控等,综合判断驾驶员的疲劳状态并进行预警。这些信息可以与盲区预警功能相互配合,形成精确的驾驶安全预警体系,提高驾驶安全性。 河南AI疲劳驾驶预警系统