物流领域里很多司机拒绝安装疲劳驾驶预警系统的原因可能有以下几个方面:司机主观因素:有些司机可能认为自己的驾驶技能足够应对所有情况,或者认为安装预警系统会干扰驾驶操作,甚至有些司机存在侥幸心理,认为自己不会疲劳驾驶,因此不愿意安装预警系统。系统可靠性问题:有些司机可能对疲劳驾驶预警系统的可靠性存在疑虑,认为系统可能会出现误报或漏报等情况,影响正常的驾驶操作。成本因素:安装疲劳驾驶预警系统的成本可能会对物流公司的运营成本造成一定压力,有些物流公司可能不愿意承担这部分额外的成本。使用习惯和接受程度:有些司机可能已经习惯于传统的驾驶模式,对于新技术持有保守态度,而且可能认为使用预警系统会增加操作步骤和复杂性,影响驾驶效率。需要指出的是,物流领域中安装疲劳驾驶预警系统是非常有必要的,因为疲劳驾驶是物流行业常见的安全隐患之一,而预警系统的使用可以有效减少因疲劳驾驶导致的事故和风险。为了推广和应用疲劳驾驶预警系统,需要加强相关宣传教育,提高司机的安全意识,同时也需要加强技术研发和可靠性提升,提高系统的准确性和稳定性。 车侣DSMS疲劳驾驶预警系统可以对接的4G管理平台有哪些?北京大车司机行为检测预警系统定制
车侣DSMS疲劳驾驶预警系统在对接协议方面需要考虑以下几个方面:接口协议:根据不同的应用场景和系统类型,疲劳驾驶预警系统可能需要与不同的接口协议进行对接。这些接口协议可能包括CAN总线、LIN总线、RS232/485串口、Ethernet/WiFi等通讯接口,以及JSON、XML、SOAP等数据交换格式。通讯协议:疲劳驾驶预警系统需要能够支持不同的通讯协议,如蓝牙、Wi-Fi、4G/5G移动网络等,以便与车载设备和传感器进行无线通讯,实时获取驾驶员的生理数据和车辆状态信息。开放性和互操作性:为了方便用户的使用和集成,疲劳驾驶预警系统应具备良好的开放性和互操作性,能够支持多种标准协议和数据格式,以便与第三方设备和系统进行无缝对接。数据安全:在对接协议中,需要考虑数据的安全性和可靠性。需要对数据进行加密处理,防止数据被非法获取或篡改。兼容性:对接协议需要考虑到不同设备和应用之间的兼容性问题。需要确保系统的兼容性,以适应不同的设备和应用场景。以上是疲劳驾驶预警系统对接协议中需要考虑的一些方面。在选择和使用对接协议时,需要结合实际情况和具体需求,选择合适的对接协议和通讯方式,以确保系统的稳定性和可靠性。 浙江5G疲劳驾驶预警系统车侣DSMS疲劳驾驶预警系统可以安装在轮船上吗?

在国内,疲劳驾驶预警系统主要被应用于商用车领域,尤其是“两客一危”等车型。这些车型包括大型客车、大型货车和危险货物运输车等,因为它们通常需要承担更重的运输任务,对驾驶员的安全和健康状况要求也更高。为了保障公共出行安全,中国已经明确规定这些车型必须安装DMS(防疲劳预警系统)。此外,乘用车领域也开始推动安装疲劳驾驶预警系统的要求,相关标准制定正在推进中。在海外,疲劳驾驶预警系统的应用也受到重视。例如,欧盟已经明确规定,从2022年7月开始,所有具备L2及以上自动驾驶系统的车辆(包括载人及载物)必须强制装配疲劳分神预警系统(DDAW)。到2024年7月以后,所有的新车也将强制安装此功能。此外,美国、日本等国家也在积极推动疲劳驾驶预警系统的发展和应用。总之,疲劳驾驶预警系统是一种重要的主动安全技术,可以有效地预防和减少因驾驶员疲劳驾驶引起的交通事故。未来,随着技术的不断发展和应用领域的扩大,疲劳驾驶预警系统将会在更广的领域得到应用。
有关疲劳驾驶系统的应用好处:提高道路交通安全:疲劳驾驶预警系统通过实时监测驾驶员的疲劳状态,可以有效地预防和减少因疲劳驾驶导致的事故,从而提高了道路交通安全水平。保障驾驶员健康:疲劳驾驶预警系统可以及时提醒驾驶员休息,避免因疲劳驾驶导致的身体不适和健康问题,有助于维护驾驶员的身体健康。提高行车安全性:通过疲劳驾驶预警系统的监测和提醒功能,驾驶员可以在疲劳状态下及时休息,避免因疲劳驾驶导致的车辆失控和意外事故,从而提高了行车安全性。减少交通拥堵:由于疲劳驾驶是导致交通事故的主要原因之一,通过疲劳驾驶预警系统的应用,可以减少交通事故的发生率,进而减少交通拥堵的情况。提高生产效率:对于物流公司等企业来说,通过疲劳驾驶预警系统的应用,可以减少因疲劳驾驶导致的延误和交通意外,从而提高生产效率和经济效益。降低保险费用:由于疲劳驾驶预警系统可以减少交通事故的发生率,因此可以降低车辆保险的赔付率,从而降低保险费用。提高行车舒适性:由于疲劳驾驶预警系统可以及时提醒驾驶员休息,避免因疲劳驾驶导致的身体不适和紧张情绪,从而提高了行车的舒适性。避免违法风险:疲劳驾驶属于违法行为。 车侣DSMS疲劳驾驶预警系统的安装视频有吗?

(上篇)自带算法识别与云端识别的司机疲劳驾驶预警系统各自具有独特的应用区别与优势,以下是对这两者的详细分析:
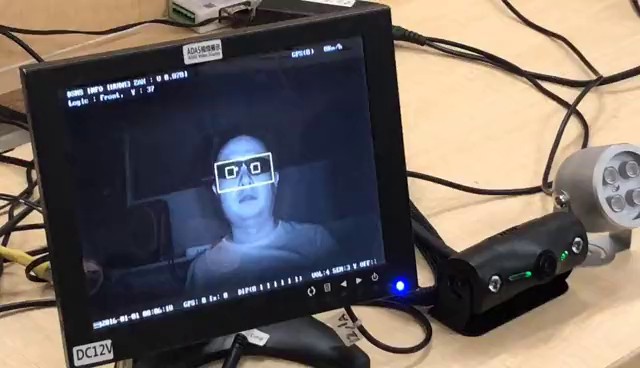
自带算法识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统在本地设备上运行算法,对采集到的驾驶员面部特征、眼部信号等进行实时处理和分析,从而判断驾驶员是否疲劳。所有数据处理和决策均在本地完成,不依赖于外部网络。系统架构:系统结构相对紧凑,包括摄像头、传感器、控制器和算法模块等关键组件,易于集成到车载系统中。隐私保护:由于数据处理在本地进行,不涉及数据上传和存储,因此具有更高的隐私保护性能。优势实时性强:由于数据处理在本地完成,系统能够迅速响应并发出预警,有效减少因网络延迟而导致的预警滞后。稳定性高:不依赖于外部网络,系统受网络故障的影响较小,因此具有更高的稳定性。成本低:无需构建和维护复杂的云端基础设施,降低了系统的整体成本。自主性强:系统完全在本地运行,不受外部因素(如网络状态、云端服务器性能等)的干扰,提高了系统的自主性。
云端识别的司机疲劳驾驶预警系统应用区别数据处理与决策:该系统将采集到的驾驶员面部特征等数据上传至云端服务器,由服务器进行算法处理和识别。
车侣DSMS疲劳驾驶预警系统对行人的作用是什么?北京大车司机行为检测预警系统定制
车侣DSMS疲劳驾驶预警系统在白天应用效果怎么样?北京大车司机行为检测预警系统定制
计算疲劳驾驶预警系统的准确率通常涉及对系统预测结果的评估。准确率是衡量一个分类系统性能的重要指标,它表示系统正确预测的样本数占总样本数的比例。在疲劳驾驶预警系统的上下文中,准确率可以通过以下公式计算:准确率(Accuracy)=TP+TN+FP+FNTP+TN其中:TP(TruePositives):系统正确预测为疲劳驾驶的样本数。TN(TrueNegatives):系统正确预测为非疲劳驾驶的样本数。FP(FalsePositives):系统错误预测为疲劳驾驶的样本数(实际上是非疲劳驾驶)。FN(FalseNegatives):系统错误预测为非疲劳驾驶的样本数(实际上是疲劳驾驶)。要计算准确率,你需要有一个标注好的测试数据集,其中包含每个样本的真实标签(疲劳驾驶或非疲劳驾驶)以及系统的预测标签。然后,你可以通过比较真实标签和预测标签来统计TP、TN、FP和FN的数量,并使用上述公式计算准确率。需要注意的是,准确率并不是评估分类系统性能的w一指标。其他常用的指标还包括查准率(Precision)和查全率(Recall),它们可以提供更全M的性能评估。在疲劳驾驶预警系统中,这些指标的具体定义和计算方法可能会根据具体的应用场景和需求而有所不同。北京大车司机行为检测预警系统定制