单伸位堆垛机与双伸位堆垛机的区别作业效率和灵活性单伸位堆垛机:作业效率相对较为稳定,在存取单一侧面的货物时,由于其结构简单,动作较为直接,运行速度可以相对较快。但是如果需要频繁更换存取货物的货架侧面(例如由于货物出入库的位置分布变化),单伸位堆垛机就需要花费更多的时间在通道中运行调整位置。它比较适合货物出入库位置相对固定,且对存储密度要求不是特别高的仓库环境。双伸位堆垛机:具有更高的灵活性,能够根据仓库管理系统的指令,快速地从货架的两侧进行货物存取。不过,双伸位货叉的结构相对复杂,每次操作货叉的伸缩时间可能会比单伸位货叉略长,而且双伸位堆垛机的控制系统也更为复杂,在进行一些复杂的货物存取任务时,可能需要更多的时间来规划路径和操作货叉。但是总体而言,在处理不同出入库任务的综合效率上,双伸位堆垛机在合适的场景下更具优势。堆垛机能够准确地将货物运输到指定位置,并精确地抓取和放置货物。重庆巷道堆垛机的工作原理

堆垛机的应用场景非常频繁,主要包括以下几个方面:其他特殊行业烟行业仓库:在烟生产企业的原料仓库和成品仓库中,堆垛机用于存储烟叶、烟丝和卷烟产品。由于烟行业对仓储环境和货物管理的要求较高,堆垛机可以提供精确的货物存取服务,同时配合温湿度控制系统,确保烟的品质。图书馆自动化存储:在一些大型图书馆或档案中心,堆垛机可用于存储书籍、文献、档案等资料。它能够将大量的资料存储在密集的书架系统中,通过自动化的检索系统,快速地找到并取出所需的书籍或档案,提高了图书馆和档案中心的资料管理效率。穿梭车巷道堆垛机介绍堆垛机在运行时可能会产生较大的噪音和振动,这可能对设备本身和周围环境造成损害。

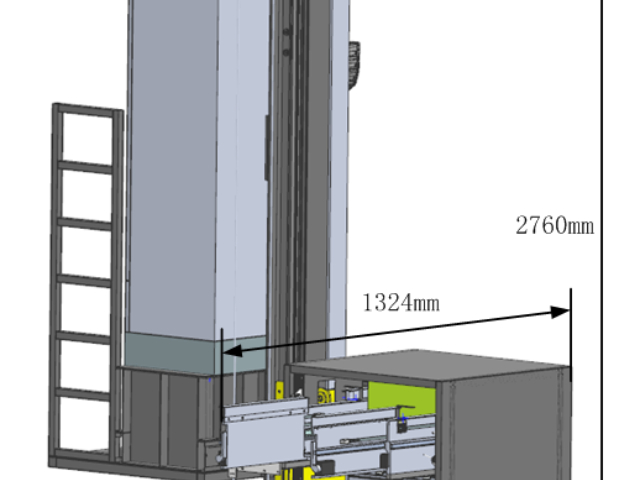
堆垛机结构主要有:水平行走结构、提升机构、取放货机构、电气柜和蓄电池等部分组成。堆垛机本体具有足够的刚度和强度,整个结构部分布局紧凑、强度高、刚性好。升机构用于驱动载货台做升降运动。提升机构主要由提升减速电机、立柱、上横梁、同步带、缓冲器、载货台等部分组成见下图。提升电机减速器机构通过支架用螺栓固定在立柱下端的下横梁上,减速器输出轴驱动同步带运动,从而带动载货台上下垂直运动。上横梁下方设有一组聚氨酯缓冲器,用于减小载货台在相对高位置对上横梁的冲击,下横梁上方也设有一组聚氨酯缓冲器,用于减小载货台在相对低位置对下横梁的冲击。
单伸位堆垛机与双伸位堆垛机的区别成本差异单伸位堆垛机:结构相对简单,设备的制造成本较低。由于其控制系统也相对简单,在设备采购价格、安装调试费用以及后期维护成本等方面都比较低。单伸位堆垛机的价格可能是双伸位堆垛机价格的60%-80%左右。而且在出现故障时,维修相对容易,零部件更换成本也较低。双伸位堆垛机:因为其复杂的货叉结构和更高级的控制系统,制造成本较高。同时,双伸位堆垛机的安装调试需要更高的技术要求,安装成本也会增加。在后期维护方面,由于其结构复杂,对维修人员的技术水平要求更高,而且零部件的价格也相对较高,所以维护成本比单伸位堆垛机高。堆垛机自身的尺寸较小,可以在较窄的巷道内运行,同时能够进行高层货架作业,从而提高了仓库的空间利用率。
堆垛机的升降驱动装置工作原理精确控制:升降驱动装置的位置控制是非常关键的。在堆垛机的立柱上通常安装有位置传感器,如旋转编码器或激光测距传感器等。这些传感器可以实时监测载货台的高度位置,并将信号反馈给电气控制系统。电气控制系统根据传感器反馈的信息,结合预先设定的目标位置,精确地控制电机的运转,从而实现载货台的准确升降。例如,当要将货物存放到高层货架的某一位置时,控制系统会根据位置传感器的反馈,使载货台准确地停在目标货位的高度,误差可以控制在几毫米甚至更小的范围内。堆垛机具有很高的可靠性,可确保7×24小时连续运行,提高了生产线的连续性和稳定性。互联网巷道堆垛机方法
堆垛机的控制系统接收指令,通过传感器检测货物的位置、重量、尺寸等,并根据预设的指令控制堆垛机的运动。重庆巷道堆垛机的工作原理
单伸位堆垛机的局限性空间利用率有限:单伸位堆垛机只能从一个方向存取货物,这就导致货架只能设计成单深形式,无法像双伸位堆垛机那样利用货架的双向空间。因此,在相同的仓库空间内,单伸位堆垛机的存储密度相对较低。存取效率相对较低:在需要频繁存取货物的高流量仓库环境中,单伸位堆垛机每次只能存取一个货位的货物,而且货叉伸缩方向单一,其整体的存取效率不如双伸位或多伸位堆垛机。例如,在大型物流配送中心的繁忙仓库区域,单伸位堆垛机可能无法满足快速出入库的需求。重庆巷道堆垛机的工作原理