
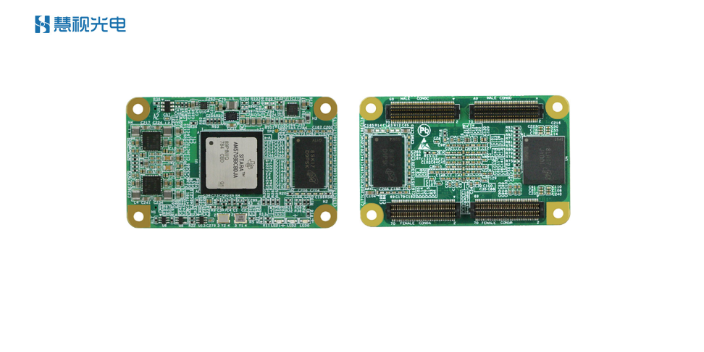
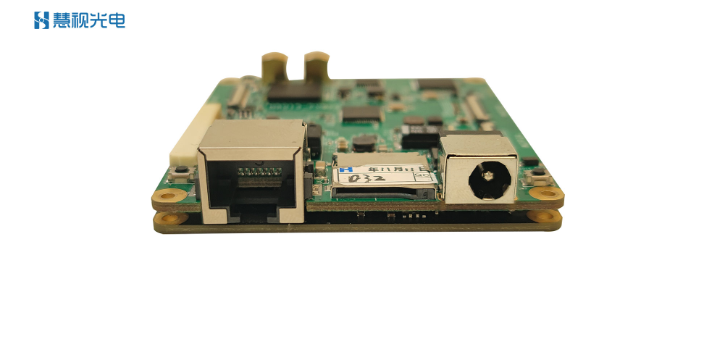
无人机夜间工作时需要依靠红外机芯进行高清成像,而想要具备AI检测识别的能力则可以通过植入图像处理板。成都慧视可以根据需求提供整套的建设方案,实现快速集成开发。慧视Viztra-LE026图像处理板+MiNO 17红外机芯的组合方案,两款产品均使用小巧设计,整体组合重量在30g左右,并且都采用小功耗设...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
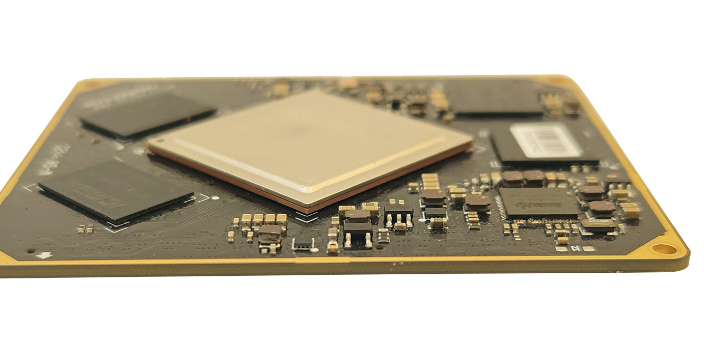
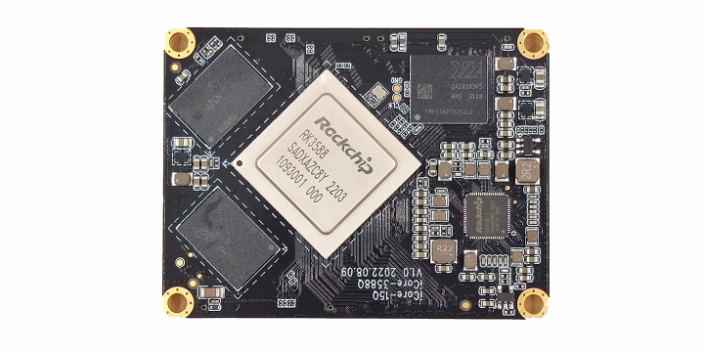
成都慧视开发的各款式的AI图像处理板,就是助力低空经济发展的传感器技术设备之一。AI图像处理板具备智能图像检测识别以及跟踪的能力,在低空经济领域,能够让无人机实现智慧化赋能。成都慧视开发的RK3588系列图像处理板Viztra-HE030,具备6.0TOPS算力,是当下国产图像处理板的性能前列的产品,对于一些复杂应用场景下的识别,RK3588是当仁不让。我司可以根据需求,定制CVBS、SDI、LVDS、DVP、CmaeraLink等接口,实现快速适配应用。而RV1126系列图像处理板Viztra-LE026,整体呈小型化设计,尺寸小,整体功耗不大于4W,用在无人机领域,一不会过多占用空间,二不会增加无人机的功耗负担,2.0TOPS的算力,也能满足大多数应用场景的需求。慧视光电对RK3588跟踪板进行二次开发,实现AI智能应用。工业目标跟踪售后服务
目标跟踪
人工智能起源于上个世纪五十年代,被誉为新时代工业发展的引擎。随着技术的发展,为了使得计算机可以拥有像人眼一样感知、分析、处理现实世界的能力,六十年代初,人工智能衍生出了一个重要的分支,计算机视觉。在计算机视觉的研究过程中,学者们为了阐述“根据目标在视频中的某一帧状态来估计其在后续帧中的状态”,一个新的学科——目标跟踪应运而生。目标跟踪是计算机视觉和机器人研发领域的重要分支,在人机交互、安全监控、自动驾驶、城市交通、军领域、医疗诊断等领域都发挥了重要的作用,其主要功能就是在视频图像中遍历感兴趣的区域,并在接下来的视频帧中对其进行跟踪福建目标跟踪应用成都RK3399智能跟踪板提供商。

而维修机器人则能够通过图像识别、精细远程控制技术,实现远程快速维修,通过加装高性能图像处理板,机器人能够精细电网缺陷以及损坏程度,并通过摄像头实时回传高清画面,工程师只需要远程操控机器人进行修补,实现精细缝合。整个过程只需要极少数的人员参与,整个巡检维修的时间能够从7小时缩减到1小时,极大地保障了电力供应。成都慧视光电采用RK3588开发而成的Viztra-HE030图像处理板,具备八核处理器,采用BTB传输接口,拥有极强传输能力,成都慧视能够凭借丰富的经验,快速集成开发SDI、CVBS、DVP、LVDS、cameralink等接口以及金属外壳和散热器。通过6.0TOPS的算力,以及丰富的接口定制,板卡能够快速适配不同的无人机和机器人,用在我国西部电力运维领域,将是工程师打造智能化维护的关键技术。
云台的旋转将直接改变摄像机的视野,因此对于云台的控制必须谨慎且准确。错误的控制会使目标从视野中消失,导致跟踪的失败。此外,如果云台的控制幅度过小,可能会达不到目标回到视野中心的目的,目标也同样极易丢失。相反如果在对目标运动速度有可靠估计的前提下,提前将目标移到视野中目标运动方向的另一侧,将为此后跟踪目标赢得更多的时间,能够提高跟踪的成功率。所以为了使对于云台的控制更为合理,应该对于不同的情况采取不同的控制策略。对于情况的划分主要取决于目标的可靠性和速度的稳定性。RK3588图像处理板是我司自主研发的目标跟踪板,该板卡采用国产高性能CPU,搭载自研目标跟踪及跟踪算法。

之所以能产生这种可见运动或表观运动,是因为物体以不同的速度在不同的方向上移动,或者是因为相机在移动(或者两者都有)在很多应用程序中,跟踪表观运动都是极其重要的。它可用来追踪运动中的物体,以测定它们的速度、判断它们的目的地。对于手持摄像机拍摄的视频,可以用这种方法消除抖动或减小抖动幅度,使视频更加平稳。运动估值还可用于视频编码,用以压缩视频,便于传输和存储。被跟踪的运动可以是稀疏的(图像的少数位置上有运动,称为稀疏运动),也可以是稠密的(图像的每个像素都有运动,称为稠密运动)跟踪视频中的特征点从前面章节介绍的内容可以看出,根据特殊的点分析图像,可以使计算机视觉算法更加实高效。慧视光电开发的慧视RK3588图像处理板,采用了国产高性能CPU。福建目标跟踪应用
快速移动的汽车怎么锁定跟踪?工业目标跟踪售后服务
目标跟踪是在首帧中给定待跟踪目标的情况下,对目标进行特征提取,对感兴趣区域进行分析;然后在后续图像中找到相似的特征和感兴趣区域,并对目标在下一帧中的位置进行预测。作为计算机视觉领域的一个热点研究方向,目标跟踪一直都是一项具有挑战性的工作。目标跟踪技术在导弹制导、智能监控系统、视频检索、无人驾驶、人机交互和工业机器人等领域具有重要的作用。从上世纪50年代目标跟踪的起源到现今,尽管已有大量的研究成果,但是在复杂条件下实现实时准确的跟踪依旧难以实现。工业目标跟踪售后服务
与目标跟踪相关的文章

黑龙江附近目标跟踪
- 哪里有目标跟踪 2026-01-05
- 稳定目标跟踪批发价格 2026-01-05
- 浙江安全目标跟踪 2026-01-05
- 省时省力目标跟踪检测 2026-01-04
- 无线目标跟踪设备 2026-01-04
- 云南靠谱的目标跟踪 2026-01-04
- 快速目标跟踪性价比 2026-01-04
- 国产化目标跟踪性价比 2026-01-04
- 广东目标跟踪检测 2026-01-04
- 辽宁快速目标跟踪 2026-01-04
- 贵州目标跟踪性价比 2026-01-04
- 自主可控目标跟踪 2025-12-31
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
青海目标跟踪性价比 2025-12-24 07:01:40视频自动跟踪系统,一般都是用在露天的、较大地域范围的监控系统中,且边跟踪边录像。在自动跟踪系统的发展上,jun用上的视频自动跟踪、毫米波雷达跟踪以及激光雷达跟踪等是比较成熟的;非jun用领域,存在一些固定画面、摄像机从不运动的的目标检测与跟踪系统;基于带红外线的、常用在演播室或者会议室的、很近距离的...
-
广东目标跟踪功效 2025-12-23 10:01:59无人装备作战狼群,有“狼”负责侦查,有“狼”负责打击,而有的“狼”则负责后勤保障,这种无人装备集群作战能够有效辅助特种作战。“机器狼”的升级之所以能够满足多样化的任务,得益于其智能化的建设。就是下面这样的一个"智慧眼"的加入,使得机器狼能够自主完成许多任务。这个智慧眼由光学系统(彩色图像)、摄像机、...
-
陕西智能化目标跟踪 2025-12-23 03:01:34腾讯开发的机器人小五,采用轮、腿、足复合设计,使得它具备越障能力的同时,也保持了轮式机器人的运行效率。每条腿都可以单独伸长缩短,能有效提升承载能力。装上了双编码器大扭矩密度的执行器后,就能承受住一般成年人的重量。将机器人用于养老服务领域,能够帮老人取快递,抱老人起床,带老人进行活动。机器人内置RGB...
-
海南目标跟踪功能 2025-12-23 11:02:04实际上,跟踪和检测是分不开的,比如传统TLD框架使用的在线学习检测器,或KCF密集采样训练的检测器,以及当前基于深度学习的卷积特征跟踪框架。一方面,跟踪能够保证速度上的需要,而检测能够有效地修正跟踪的累计误差。不同的应用场合对跟踪的要求也不一样,比如特定目标跟踪中的人脸跟踪,在跟踪成功率、准确度和鲁...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
省时省力目标跟踪检测
2026-01-04 -
无线目标跟踪设备
2026-01-04 -

放心图像处理板产品
2026-01-04 -
内蒙古低压线目标识别自主可控
2026-01-04 -
河南视频目标识别创意
2026-01-04 -
甘肃可靠目标识别供应商
2026-01-04 -

河南视频目标识别解决方案
2026-01-04 -
海南安全目标识别经验丰富
2026-01-04 -
云南靠谱的目标跟踪
2026-01-04