轴心轨迹在时域中使用两个数据通道来显示,来自两个通道的信号绘制在X和Y平面上,以显示轴位置变化与旋转角度的关系。轴心轨迹显示给出了旋转轴运动的二维视觉图像。该功能位于动态信号分析系统中的后处理软件(PA)中。一个平衡良好的轴,在任何方向都不会移动,并会在(轴心轨迹)图中间产生一个点。轴运动可以给出振动源的指示,例如如果有很多上/下运动,可能是机座没有拧紧。要创建轨迹图,您需要采用双通道同时测量水平轴和垂直轴上的数据。位移或加速度传感器位置必须相互间隔90°。轴心轨迹显示采用时域中的测量对。它不需要阶次技术。 半导体厂房微振动环境测试。广西16通道控制系统
路谱(TWR)的目标谱编辑:任何采样率的波形都可以进行数字重采样、缩放、滤波,并且可以使用EDM-波形编辑器通过不同的补偿技术来编辑目标谱。还提供了裁剪、追加和插入波形部分的选项。波形编辑器是一种修改时域波形的工具,用以适应振动台的再现要求。它可以拼接、裁剪、滤波,并对加速度、速度和位移波形进行补偿。它不同于后分析应用程序,因为它不做FFTs或任何其他形式的分析。该功能属于EDM振动噪声测试系统VCS的一部分。通用选项:谱线数用于频谱分析,设置谱线数。线数越高,越增加频域数据的分辨率。Bin数值设置直方图数据的分辨率。目标谱数量将量纲设置为加速度、速度、位移或电压。撤消比较大步骤设置撤消命令的缓存操作数开始平均数设置平均的开始帧。湖南正弦控制供应商永磁同步电机振动信号分析。

SPIDER-81振动系统振动仪振动台仪以DSP为**的结构与传统器过重依赖于外部计算机进行实时操作不同,Spider振动台仪是***个将时间同步以太网连接与嵌入式DSP直接集成在一起的器。这一策略极大地增强了性能、系统可靠性和异常保护能力,使得系统可以配置极大的通道数却不影响系统性能。***的硬件设计Spider81振动器模块装备有电压、电荷和IEPE输入通道,可适用于冲击、振动和声学测试及其它通用的电压信号测量。其内部闪存可以同时储存数百个通道的测试配置数据和实时分析数据。多个输出通道提供了各种与输入采样频率同步的信号波形。配备了一个能够显示测试状态信息的液晶显示屏。每台设备提供10个监测连接来读取模拟输入和输出信号,前面板上还有多个操作按键。通过内置的**数字I/O和RS485串行端口可以连接到其他硬件。有一个紧急终止按钮可以在危急情况下中断测试网络连接方便以太网连接方式使得Spider-81振动仪在物理距离上可以与PC机离开较远,这种分布式的结构方式**减少了噪声和系统中的电子干扰。通过网络一台PC机可以监视和多台器。由于过程和数据记录都在器内部执行,网络连接方式并不会影响性能。
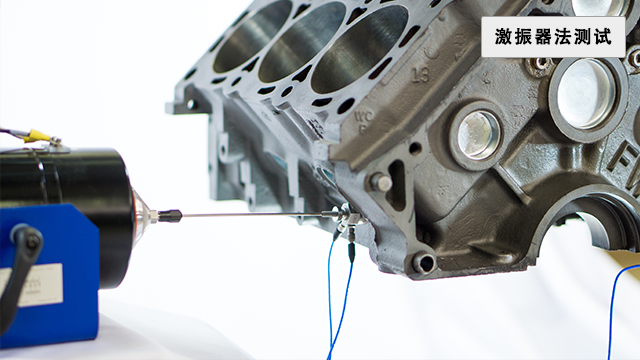
经典冲击测试(又经典冲击)是指输出一系列的脉冲来激励结构。在结构的一个或者多个位置测量其响应,通过频谱分析识别出结构的共振特性。这种脉冲响应与脉冲响应函数(其傅里叶变换等效于系统的频响函数)相似。傅里叶变换的脉冲响应是该系统的频率响应函数(FRF)。冲击过程本质上是时域波形复制过程,它使用基于FFT的算法来为测试系统动力学做更正。算法类似于随机用的算法。不同之处在于测试目标谱是如何定义的:在随机里,它是定义在频域;在冲击里,它是定义在时域。假定振动测试系统是线性的,这意味着它的任何输入的响应可以从它的频率响应函数进行预测。在过程中,该频响不断估计和更新,并用来计算所述输出驱动信号。该输出波形应导致测试系统中一个信号的测试信息相匹配的方式作出反应。振动可视化功能可用于VCS软件的所有测试类型。

一次随机测试在特定频带上产生多个频率,而正弦扫频测试只产生一个频率,并且该频率预先设置的范围内扫描。利用信号的反馈调节输出幅值,使UUT的响应幅值与测试目标谱相匹配。测试目标谱是幅值(通常定义为峰值加速度)与频率的关系图。RSD、RSTD,是正弦扫频测试的扩展。正弦扫频过程包括产生一个正弦波输出,在测试中激励待测设备,检测信号输入幅值,将检测到的与参考幅值进行比较,并适当地更新驱动信号幅值。为了测量输入信号的水平,探测器可以使用滤波器,或者可以测量信号的RMS、峰值或平均值。当使用滤波器时,会产生振幅和相位数据,而其他测量方法只产生幅值数据。如果使用多个通道,则每个检测器的输出在通道平均块中进行组合。滤波器**降低了正弦驱动频率上下的噪声和谐波信号。他们的中心频率总是调整到当前的驱动频率,使得其他信号不被测量和。滤波器带宽可以是固定的,也可以是与当前频率成比例的。基于当前中心频率和带宽,晶钻仪器的Spider振动测试系统不断更新滤波系数。它有一个约为-60分贝。滤波器的输出被平均以产生一个幅值,然后由比较器用来校正输出驱动幅值。 针对地震模拟的应用,瞬态冲击振动器匹配任何用户定义的瞬态波形。广西16通道控制系统
使用CoCo-80X对桥梁结构进行振动测试。广西16通道控制系统
随机测试在随机振动测试中,由一宽带随机信号驱动振动台,通过回路信号调整该驱动信号,以产生一个与测试目标谱相符合的响应。这种算法可以计算输出驱动和输入通道之间的逆传递函数,是放大器、振动台和动圈之间的综合结果。产品的逆传递函数和响应谱可以产生一个输出驱动谱,然后相位随机发生器和逆FFT产生一个随机来驱动输出时间流。随机振动器(如:Spider-81)的关键要求之一是实现高动态范围。动态范围是比较信号中比较高和比较低光谱幅度的一种方法。Spider能达到至少90dB动态范围。这可以通过修改的测试标准JJG-948来衡量。JJG-948只要求动态范围到60dB。通过对噪声下限的修改,可以显示出更高的动态范围。 广西16通道控制系统