另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相...
目标跟踪基本参数
- 品牌
- 慧视科技
- 型号
- 可咨询
- 输出信号
- 数字型,定制
- 制作工艺
- 集成,薄膜,陶瓷,可定制
- 材质
- 可定制
- 材料物理性质
- 导体,磁性材料,定制
- 材料晶体结构
- 定制
- 加工定制
- 是
目标跟踪企业商机
成都慧视开发Viztra-HE030图像处理板就十分合适,工业级芯片RK3588的加持下,至高输出6.0TOPS的算力,足以满足工业检测需求。而像背景稍微简单的地面人、车,湖面船舶的检测,如果不是特殊需求,选择性能适中的Viztra-ME025图像处理板就能够满足需求。板卡采用国内智能AI芯片RK3399Pro,基于双Cortex-A72+四Cortex-A53大小核CPU结构;CPU主频1.8GHz;能够输出3.0TOPS的算力,在我司高精尖目标识别算法的赋能下,就能够实现人车船的检测识别。RV1126图像处理板识别概率超过85%。河南信息化目标跟踪
目标跟踪
另外,经典的跟踪方法还有基于特征点的光流跟踪,在目标上提取一些特征点,然后在下一帧计算这些特征点的光流匹配点,统计得到目标的位置。在跟踪的过程中,需要不断补充新的特征点,删除置信度不佳的特征点,以此来适应目标在运动中的形状变化。本质上可以认为光流跟踪属于用特征点的来表征目标模型的方法。在深度学习和相关滤波的跟踪方法出现后,经典的跟踪方法都被舍弃,这主要是因为这些经典方法无法处理和适应复杂的跟踪变化,它们的鲁棒性和准确度都被前沿的算法所超越,但是,了解它们对理解跟踪过程是有必要的,有些方法在工程上仍然有十分重要的应用,常常被当作一种重要的辅助手段。宁夏快速目标跟踪智能图像处理板在边海防中的应用。

这样的无人机智慧“眼”可以通过搭载吊舱实现,吊舱内置各种规格的摄像机,能够实现多角度观察。而智能化则可以在吊舱的基础上植入高性能AI图像处理板。图像处理板能够对摄像机获取的图像进行AI智能分析,这样无人机就能够自动识别缺陷,然后进行信息留存、回传。在这个领域,成都慧视光电可以根据需求进行多接口图像处理板的定制,选择成都慧视开发的RK3588系列图像处理板,支持选择SDI、CVBS、LVDS、USB、cameralink等接口。RK3588拥有6.0TOPS的算力,能够在各种复杂环境进行稳定工作。板卡和识别算法的强强联合下,无论白天黑夜,无人机都可以实现自助巡检,就不需要过多的人工参与。也是一种降本增效的举措。
美国再度要求台积电停止出口7纳米芯片给大陆,目前看来国产AI图像处理的性能还得由RK3588稳坐,不久前传出了瑞芯微RK3688至少在一两年内无法推出,因此对于许多有高性能AI图像处理板需求的客户无需再等了。当下,选择RK3588至少还可以保持性能***两三年,而在国内进行RK3588开发的厂家中,成都慧视凭借多年的丰富经验,已经形成一整套快速的开发流程,针对于RK3588这样的高性能图像处理板,能够快速定制SDI、CVBS、DVP、Cameralink等接口,满足不同行业的需求。并且,随着不少领域等目标跟踪稳定性的进一步提升,针对于高帧频目标跟踪这块,成都慧视也完成了成熟的方案,通过RK358+FPGA,实现高帧频相机的输入输出,为目标跟踪提供更多的细节信息。RK3588图像处理板识别概率超过85%。

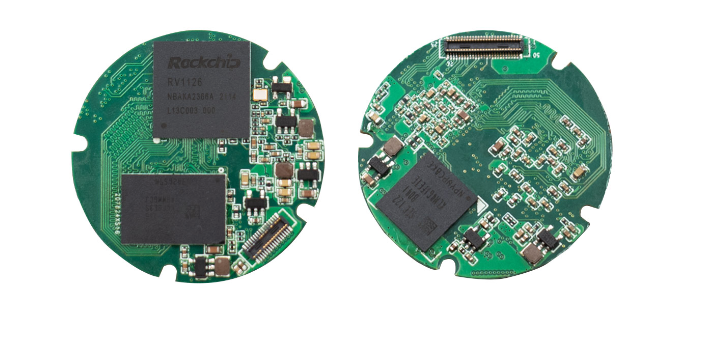
无人机的智能化是推动低空经济发展的重要引擎,打造智能无人机需要通信、控制、传感器等多种技术的共同作用,其中图像处理板的目标检测识别技术能够在智慧巡检、智慧交通管理、智慧河湖巡查等领域有着积极作用。在成都慧视开发的多款图像处理板中,Viztra-LE026以小型化、低功耗的特点深受行业青睐。Viztra-LE026图像处理板采用了全国产化芯片RV1126,板卡外形呈圆形设计,尺寸为Φ38mm*12mm,重量12g,虽然小巧,但是算力可达2.0TOPS,能够凭借1路MIPI视频输入和1路DVP视频输入实现对目标实时自主检测、识别,并自动或手动锁定跟踪人、车、船等目标。智能化的图像处理板还可以实现自动化的数据分析,实现降本增效。青海耐用目标跟踪
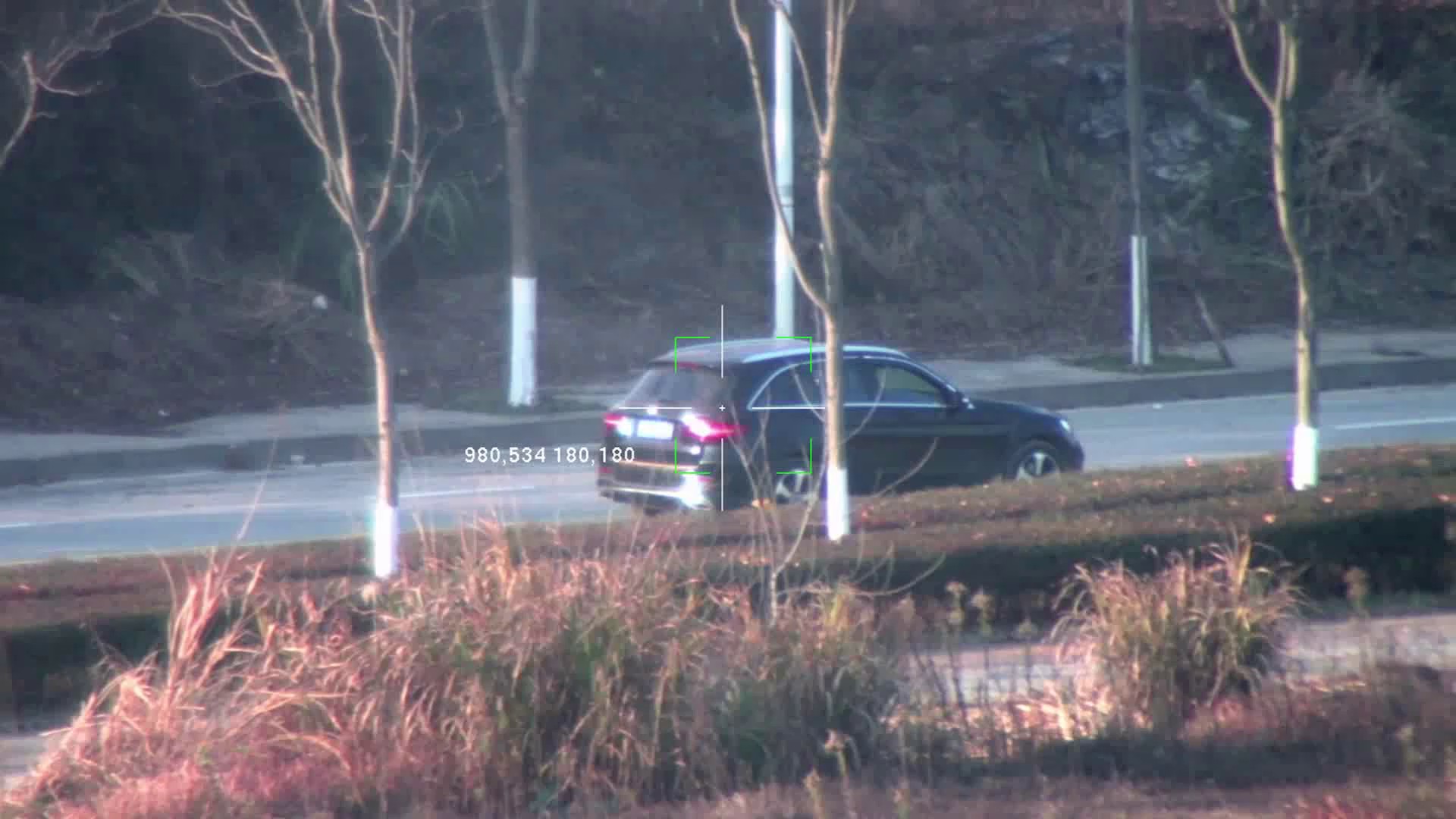
RK2588搭载AI智能算法,实现目标识别与跟踪。河南信息化目标跟踪
相关滤波的跟踪算法始于2012年P.Martins提出的CSK方法,作者提出了一种基于循环矩阵的核跟踪方法,并且从数学上完美解决了密集采样(Dense Sampling)的问题,利用傅立叶变换快速实现了检测的过程。在训练分类器时,一般认为离目标位置较近的是正样本,而离目标较远的认为是负样本。回顾前面提到的TLD或Struck,他们都会在每一帧中随机地挑选一些块进行训练,学习到的特征是这些随机子窗口的特征,而CSK作者设计了一个密集采样的框架,能够学习到一个区域内所有图像块的特征。河南信息化目标跟踪
与目标跟踪相关的文章

江西目标跟踪检测
- 江西目标跟踪解决 2025-09-28
- 工业目标跟踪哪里好 2025-09-28
- 云南流畅目标跟踪 2025-09-28
- 自主可控目标跟踪应用 2025-09-28
- 福建智能化目标跟踪 2025-09-28
- 新疆人防目标跟踪 2025-09-28
- 江苏如何目标跟踪 2025-09-28
- 福建目标跟踪互惠互利 2025-09-28
- 网络目标跟踪 2025-09-28
- 甘肃耐用目标跟踪 2025-09-28
- 广东目标跟踪售后服务 2025-09-28
- 哪里有目标跟踪市场报价 2025-09-27
与目标跟踪相关的产品




与目标跟踪相关的新闻
-
省时省力目标跟踪服务电话 2025-09-27 04:02:16无人机在军备领域有着突出作用,它不仅能帮助进行信息侦查,还能进行智能炮弹高空精细打击。其中,在智能精细打击领域,少不了人工智能的参与。通过人工智能的控制分析,能够实现对打击目标的AI识别。选择这样的方式,能够减少末端打击时对方电子干扰的影响,尽可能保证无人机的重复使用,图像处理设备显然比无人机本身更...
-
高效目标跟踪价格信息 2025-09-27 07:02:40激光反无设备的摄像头中加装了高性能的AI图像处理板,将设备部署在预定区域,AI图像处理板在算法的加持下,实现对禁飞区域空中目标的24小时不间断AI巡逻,能够快速发现、锁定、处置目标,在数秒内利用高能激光毁伤无人机目标。要想到达更加精细的识别目的,板卡的性能很关键,同时视频数据的质量同样重要。高帧频的...
-
高效目标跟踪报价行情 2025-09-27 01:02:41利用无人机实现智能化识别能够帮助我们提升许多工作效率,在很多行业都有应用。像安防巡检、交通管理等,飞在高空的无人机比传统的地面巡逻更有视野,更能搜集掌握全局信息,再通过和地面巡逻的配合,能够有效减少工作量。但是在无人机识别的过程中会遇到很多问题,比如当环境变得复杂时,识别的精度可能就会受到影响。AI...
-
贵州目标跟踪检测 2025-09-27 05:02:58如今,无人机在我们生活中的应用越来越广。例如无人机巡检安防领域,无人机能够到达人无法触及的一些角度,能够很大程度上扩大安防检查的覆盖面。在工地、电力、化工等行业,晚上巡检是必不可少的环节,并且晚上巡检还能发现白天无法看到的一些问题,在白天,一般的相机效果很好,能够看到非常清晰的监控画面,但是到了晚上...
与目标跟踪相关的问题
新闻资讯
产品推荐
-
云南自主识别图像识别模块器
2025-12-16 -

RV1126主板图像识别模块
2025-12-16 -
湖北智能化目标识别工具
2025-12-16 -

河南智慧交通图像识别模块解决方案
2025-12-16 -
河南智慧工业图像识别模块厂家
2025-12-16 -
移动目标识别定制
2025-12-16 -
海南智能化目标识别情况
2025-12-15 -

江西无源目标识别郑重承诺
2025-12-15 -
河南低压线目标识别办公平台
2025-12-15