航天伺服电动缸在航天领域同样具有重要地位。其作用在于为航天器的姿态控制、有效载荷的展开与回收等关键任务提供精确的运动控制。工作原理上,航天伺服电动缸采用特殊设计的伺服电机和传动机构,以适应太空环境的极端条件。其高精度、高响应速度的特点确保了航天器在太空中的精确操作和稳定运行。在卫星、火箭等航天器的研制和发射过程中,航天伺服电动缸的应用为探索宇宙提供了有力支持。尽管各类伺服电动缸在应用领域和工作原理上有所差异,但它们都具备高精度、高响应速度、高可靠性等共性优势。这些优势使得伺服电动缸在工业自动化、航空航天、人形机器人等多个领域得到了普遍应用。未来,随着技术的不断进步和应用需求的不断提高,伺服电动缸将朝着更高精度、更高速度、更智能化方向发展。同时,新材料、新工艺的应用也将进一步提升伺服电动缸的性能和可靠性,为相关产业的发展注入新的活力。高精度伺服电动缸实现微小位移的精确控制。西安精密伺服电动缸

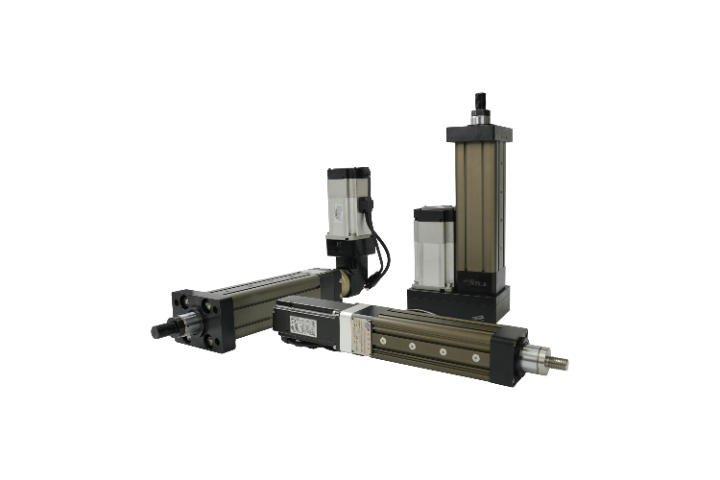
在模具制造领域,伺服电动缸用于驱动模具的开合、顶出等动作,实现模具的精确控制。其高精度、高速度的特点能够确保模具制造过程的准确性和效率,提高模具质量和生产效率。同时,伺服电动缸的闭环控制系统能够实时反馈模具状态,及时调整控制参数,优化模具制造过程控制。此外,其高可靠性和长寿命也降低了模具制造企业的维护成本,提升了企业的竞争力。在阀门控制领域,伺服电动缸用于驱动阀门的开闭和调节,实现流体的精确控制。其高精度、高响应速度的特点能够确保阀门调节的准确性和稳定性,提高流体控制的效率和准确性。同时,伺服电动缸的闭环控制系统能够实时反馈阀门状态,及时调整控制参数,优化阀门控制过程。此外,其防爆、防腐等特性也满足了特殊工况下的阀门控制需求,为阀门控制行业带来了卓著的经济效益和社会效益。折返式伺服电动缸选型直线式伺服电动缸与直线导轨配合,实现平稳直线运动。
3C半导体行业对设备的精密制造能力要求极高,伺服电动缸在这一领域发挥着关键作用。它用于驱动晶圆传输机械臂、精密定位平台等设备,实现微小部件的精确装配和检测。伺服电动缸的高精度、高速度和高稳定性能够确保半导体制造过程的准确性和效率,提高产品质量和产量。同时,其低噪音、低振动的特点也满足了半导体制造对洁净环境的要求,为3C半导体行业的发展提供了有力支持。精密制造领域对设备的精度控制要求极高,伺服电动缸以其微米级的精度控制能力,成为精密制造的理想选择。它用于驱动精密机床、测量仪器等设备,实现微小部件的精密加工和测量。伺服电动缸的高精度编码器、传感器和先进的控制算法能够确保运动过程的准确性和稳定性,提高产品质量和生产效率。此外,其高可靠性和长寿命也降低了精密制造企业的维护成本,提升了企业的竞争力。
高速伺服电动缸以其极快的响应速度和运动速度,满足了高速加工、快速定位等应用场景的需求。其作用在于提高生产效率,缩短加工周期。工作原理上,高速伺服电动缸采用高性能伺服电机和优化的传动机构,通过先进的控制算法实现快速、精确的运动控制,为高速工业生产提供了有力保障。防水伺服电动缸通过采用高级别的防水防尘设计,适应了户外或潮湿环境下的工作需求。其作用在于确保设备在恶劣条件下的稳定运行,延长设备使用寿命。工作原理上,防水伺服电动缸在保持伺服电动缸基本工作原理的基础上,通过增加防水密封件、优化外壳结构等措施,提高了设备的防水防尘能力,为户外和潮湿环境下的工业生产提供了可靠保障。伺服电动缸的驱动器调整电机参数,优化运动性能。
防爆伺服电动缸在石油化工、煤矿开采等易燃易爆环境中发挥着重要作用。其作用在于确保设备在轰炸性气体环境中的安全运行,防止因电气火花引发安全事故。工作原理上,防爆伺服电动缸采用隔爆、增安等防爆措施,将电机、控制器等电气部件与外部环境隔离,同时优化机械结构以提高抗爆能力,为特殊环境下的工业生产提供了可靠保障。六自由度伺服电动缸通过集成多个运动轴,实现了空间内任意方向和角度的运动控制。其作用在于为机器人、仿真模拟等领域提供高度灵活的运动解决方案。工作原理上,六自由度伺服电动缸由多个独自的伺服电动缸和旋转关节组成,通过协同工作实现复杂的空间运动,为机器人技术、虚拟现实等领域的发展提供了有力支持。物料搬运伺服电动缸实现物料快速、准确搬运。云南汽车装备伺服电动缸
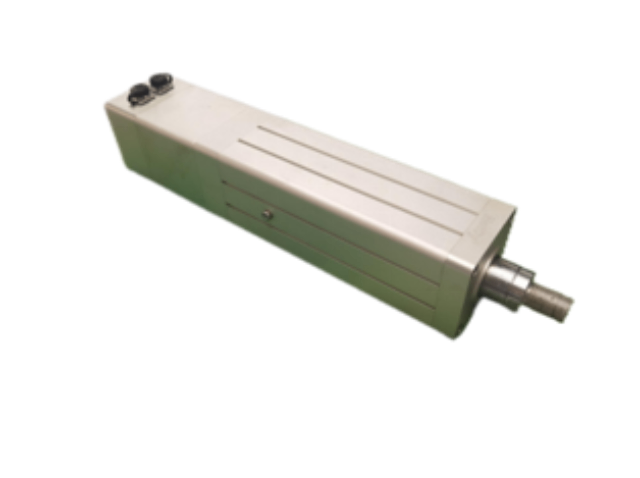
防爆伺服电动缸在易燃易爆环境中,确保设备安全运行。西安精密伺服电动缸
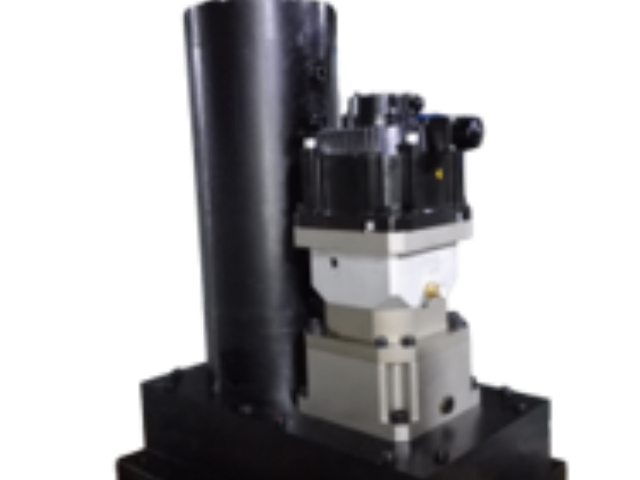
大吨位伺服电动缸以其强大的推力输出,成为重载机械、大型设备驱动系统的优先选择。其作用在于提供足够的动力,确保设备在重载或高阻力环境下的稳定运行。工作原理上,大吨位伺服电动缸采用大功率伺服电机和强化型传动机构,通过优化机械结构和控制算法提高推力输出和稳定性。在重工机械、大型压机等领域,大吨位伺服电动缸的应用卓著提高了生产效率和安全性。人形机器人伺服电动缸在人形机器人领域发挥着关键作用,为机器人提供了灵活、精确的运动能力。其作用在于模拟人类肢体的运动,实现机器人的行走、抓取、操作等功能。工作原理上,人形机器人伺服电动缸采用高精度、高响应速度的伺服电机和传动机构,结合先进的控制算法,实现机器人关节的精确控制。这种设计使得机器人能够像人类一样灵活运动,提高了机器人的智能化水平和实用性。西安精密伺服电动缸
伺服电动缸的能耗优化技术,主要围绕动力传输效率提升与按需供能模式展开。在动力传输环节,通过优化传动机...
【详情】行星滚柱丝杠型伺服电动缸采用多滚柱与丝杠啮合的传动结构,相比滚珠丝杠型,承载能力更强,可承受更大的推...
【详情】带传动伺服电动缸依靠同步带与带轮的配合完成动力传递,伺服电机的旋转通过同步带带动丝杠转动,进而实现推...
【详情】伺服电动缸在半导体设备中的应用,以超高精度控制为**需求,适配半导体制造的严苛标准。在芯片封装环节,...
【详情】滚珠丝杠型伺服电动缸以滚珠丝杠为**传动部件,通过滚珠与丝杠、螺母的滚动摩擦替代滑动摩擦,减少传动过...
【详情】