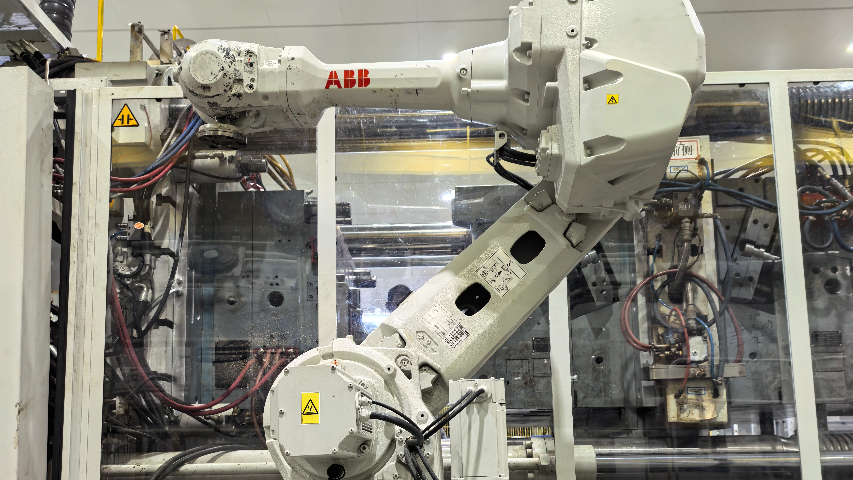
工业机器人项目背景与目标背景:在温州某开关元器件厂的生产流程里,机加工车床的上下料长期依赖人工操作。人工操作不仅速度慢,难以满足日益增长的订单需求,而且受人为因素影响,产品质量稳定性差。同时,工人长时间重复劳动,易产生疲劳,增加了工伤事故风险。为突破这些生产瓶颈,提升整体生产效能,引入机床自动上下料项目刻不容缓。目标:借助机器人1600实现机加工车床的自动上下料,大幅提高生产效率,减少人工干预导致的质量波动,降低工人劳动强度与安全隐患,增强企业在开关元器件制造领域的市场竞争力。系统构成机器人1600:该机器人具备出色的负载能力,能够精确抓取各类规格的开关元器件坯料及加工后的成品。其灵活的关节设计和稳定的运行性能,确保在复杂的机床工作环境中,可快速、准确地完成上下料动作,有效缩短加工周期,提升生产效率。机加工车床:作为开关元器件加工的重点设备,拥有高精度的切削、钻孔等加工功能。通过与机器人1600的自动化对接,实现坯料快速装夹、高效加工以及成品及时下料,保障加工过程的连续性和稳定性,从而提高产品质量。周边辅助设备:包括用于暂存坯料和成品的料仓,其合理的结构设计方便机器人取放物料;传输轨道。 ABB机械臂示教器维修,原厂配件保障质量。三明ABB机器人维护保养

在食品饮料码垛生产线,工业机器人需频繁抓取包装瓶、纸箱等产品,日均完成超 2 万次码垛动作,机械臂关节和伺服电机长期处于高负荷运转状态。某饮料厂的码垛机器人运行 2 年后,出现动作迟缓、定位偏差问题,导致码垛效率下降 20%。智小航维护团队使用振动频谱分析仪检测关节轴承,发现谐波减速器齿轮磨损严重。团队更换高度合金齿轮,注入高粘度抗磨润滑脂,并对伺服电机进行温升测试和绝缘检测。同时,优化机器人运动轨迹算法,减少不必要的惯性冲击。经过系统化维护,该机器人使用寿命从 5 年延长至 8 年,故障率降低 65%,码垛效率恢复并提升 15%。舟山ABB4600机器人维护保养清理机械臂的集尘装置,防止因堵塞影响吸尘效果,浙江展杭清理维护,保持环境清洁。

监控确保物料在不同环节间顺畅流转;以及各类传感器,用于实时监测机器人、车床及物料的状态,为整个系统的安全稳定运行提供保障。工作原理物料识别与定位:在料仓处设置先进的视觉识别系统,对放置其中的开关元器件坯料进行精确识别与定位。利用先进的图像算法,快速获取坯料的形状、尺寸及位置信息,并将这些数据传输至机器人控制系统。机器人取料与上料:机器人1600依据视觉系统反馈的信息,规划便捷运动路径,移动至料仓抓取坯料。其末端执行器根据坯料的形状和尺寸,自动调整抓取力度与方式,确保抓取牢固。随后,机器人迅速将坯料运送至机加工车床的装夹位置,精确完成上料操作。车床加工:机加工车床在接收到上料完成信号后,立即启动加工流程。依据预先设定的程序,对坯料进行高精度的切削、钻孔等加工操作,将坯料转化为符合要求的开关元器件成品。机器人下料与卸料:加工完成后,车床发出信号,机器人1600再次动作,准确抓取成品并将其放置到指定的传输轨道或成品料仓。在整个过程中,机器人的动作与车床的加工节奏紧密配合,实现高效、连续的自动上下料作业。项目优势明显提升生产效率:机器人1600的高速运行与精确动作,大幅缩短了上下料时间。
六轴工业机器人在汽车焊装车间的技术集成与应用在现代化汽车焊装车间中,六轴工业机器人通过高精度激光视觉定位系统与智能控制算法的深度融合,实现了±定位精度,满足车身焊接工艺的毫米级公差要求。以ABBIRB6700为**的机型,凭借210kg负载能力与多任务末端执行器设计,可同步完成电阻焊枪焊接与抓具搬运的复合工序,***提升产线空间利用率与设备复用率。其第六轴中空式结构设计(2025年技术升级款)进一步优化了线缆管理,减少运动干涉风险。智能化产线的协同优化与效率突破12台机器人协同作业时,通过粒子群算法优化路径规划,将传统TSP(旅行商问题)模型应用于焊点序列排序,使单台节拍时间压缩至45秒以内。实际案例显示,类似配置的产线通过伺服焊接技术与动态补偿系统,可实现焊接速度2米/分钟、热变形量≤,良品率提升至。此外,模块化夹具与拖拽示教功能支持快速换型,适应多车型混线生产需求,调试时间从4小时缩短至15分钟。技术发展趋势与行业**数据当前弧焊机器人正向中**升级,中厚板焊接负载≥10kg、薄板焊接负载6kg成为技术指标分水岭。库卡KR210等机型通过±,在车门总成焊接中实现单工位多工艺集成。据2025年行业数据。 对机械臂的防护涂层进行维护,可防止金属腐蚀,有问题找浙江展杭,延长设备使用寿命。

ABBIRB910INV倒装型机器人作为工业机器人精度**,其±定位精度通过三项**技术实现:机械结构优化采用碳纤维增强臂体,热膨胀系数<μm/℃谐波减速器+直驱电机组合,传动背隙<°环境控制系统气浮隔振底座消除地面振动(隔振频率>50Hz)恒温油冷循环系统维持关节温度波动±℃闭环反馈体系激光干涉仪实时校准(采样率1kHz)六维力传感器补偿装配接触力(分辨率)典型应用案例:光刻机透镜组装∎通过纳米级运动轨迹规划,实现透镜组间距误差<10nm∎配合白光干涉仪进行在线检测,良率提升至MEMS传感器封装∎压电陶瓷驱动轴实现μm步进分辨率∎视觉-力觉混合控制完成5μm焊球精细植球该机型在半导体领域实测显示:■晶圆搬运碎片率从■MEMS器件贴装周期缩短40%。安川喷涂机器人年度保养计划,预防性维护更省心。杭州市ABB机器人换油保养
维护机械臂末端执行器,能确保抓取精确,避免工件掉落,设备出现状况,就找浙江展杭快速处理。三明ABB机器人维护保养
电子元器件码垛生产线,小型精密码垛机器人以高速、高精度完成芯片托盘、电路板的码垛作业,直线模组和真空吸盘易出现磨损和漏气。某电子厂的码垛机器人运行 18 个月后,出现码垛位置偏移、吸盘吸力不足问题。智小航维护人员使用激光干涉仪校准直线模组精度,更换高耐磨导轨滑块,对真空系统进行氦质谱检漏,更换全氟橡胶密封圈。优化真空发生器控制逻辑,实现吸盘压力动态调节。维护后,机器人使用寿命从 3 年延长至 5 年,码垛精度提升至 ±0.1mm。三明ABB机器人维护保养
ABBFlexPendant示教器采用图形化交互设计,配备8英寸高灵敏度触摸屏,支持多种编程模式...
【详情】ABB工业机器人定期保养服务定期的保养是机器人正常运行和确保作业安全的关键。ABB工业机器人建议...
【详情】浙江展杭自动化科技采用的ABBTrueVision视觉系统包含2D/3D双模式识别功能。在汽车制造领...
【详情】在协作机器人应用中,智小杭实施“人机交互安全强化方案”:通过力觉传感器定期标定(灵敏度±0.1N...
【详情】ABB工业机器人定期保养服务定期的保养是机器人正常运行和确保作业安全的关键。ABB工业机器人建议...
【详情】工艺品打磨生产线,机器人需对各类材质的工艺品进行精细打磨,对设备的灵活性和精度要求极高。某工艺品厂的...
【详情】一旦有人体不慎闯入危险区域,机器人会瞬间响应,即刻停止运行,多方位保障学生的人身安全。实训台上对工...
【详情】食品饮料的包装生产线上,工业机器人以每分钟 300 瓶的速度完成贴标、装箱作业。考虑到食品行业卫生要...
【详情】在新能源电池制造的注液工序中,工业机器人以 ±0.01ml 的超高精度完成电解液注入。由于电解液具有...
【详情】浙江展杭自动化科技:机器人服务领域的专业守护者,以硬核实力铸就竞争壁垒在工业机器人普及浪潮下,...
【详情】电子元器件上下料生产线中,小型精密取放机器人以极高的速度和精度作业,其真空吸盘和微型传动机构易出现老...
【详情】