弧焊机器人的机械执行单元是实现准确焊接动作的基础,主要由多关节机械臂与末端执行器构成。机械臂通常采用 6 轴或更多自由度设计,每个关节配备高精度伺服电机与减速机构,可实现 360 度灵活旋转与毫米级位移控制,确保焊枪能抵达复杂工件的任意焊接位置。末端执行器即焊枪组件,集成了导电嘴、保护气体喷嘴等部件,能稳定输送焊接电流与保护气体,配合机械臂的运动轨迹完成连续焊接作业。这类机械结构采用高超度合金材料制造,兼具轻量化与高刚性特点,可在长时间高频次作业中保持稳定的运动精度,满足汽车制造、工程机械等行业的批量生产需求。弧焊工作站可根据不同的焊接需求和工件形状进行灵活配置,如更换焊接电极、调整工装夹具等。合肥移动式焊接工作站销售

传感与检测装置为弧焊机器人提供环境感知能力,助力实现自动化与智能化焊接。常见的传感器包括电弧传感器、视觉传感器与触觉传感器:电弧传感器通过监测焊接电流与电压变化,实时判断焊枪与工件的相对位置,实现焊缝跟踪;视觉传感器借助高清相机拍摄焊缝图像,经图像处理算法识别焊缝位置与形状,为路径修正提供依据;触觉传感器则能感知焊接压力等物理量,确保工件装配与焊接过程的贴合度。这些传感装置与控制系统协同工作,可有效应对工件尺寸误差、装配偏差等问题,提高焊接质量的一致性。上海激光切割工作站销售降低废品率节约材料成本?
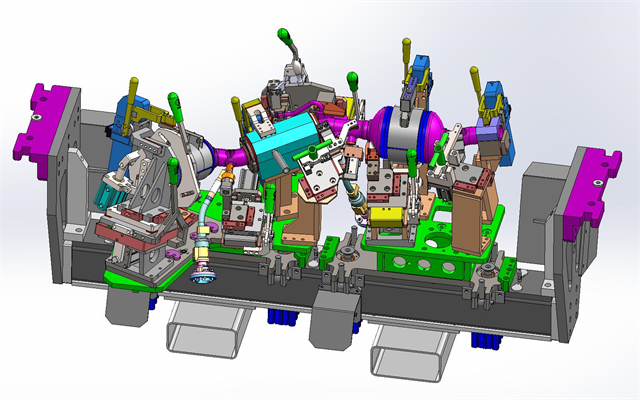
焊接工装夹具采用高强度合金钢材制造,关键受力部位经过热处理强化,整体承重能力可达常规夹具的 1.5 倍以上。夹具表面采用多层防腐涂层处理,能耐受焊接过程中的飞溅火花、高温辐射及金属烟尘侵蚀,延长使用寿命。转动轴等活动部件配备自润滑轴承,在长期高频使用中仍能保持灵活运转,减少维护频率。针对不同焊接工艺特点,夹具设计预留了合理的操作空间,避免与焊枪、焊丝等设备发生干涉,同时便于焊后快速取放工件。这种耐用性设计让夹具可适应车间连续作业环境,降低设备更换频率,为生产稳定性提供有力支持。
电弧监测与反馈单元是保障焊接质量的重要环节,通过各类传感器实时捕捉焊接过程中的关键数据。电弧电压传感器与电流传感器持续采集电弧参数,将信号传输至处理模块进行分析,当参数偏离预设范围时,及时发出调整指令。焊缝跟踪传感器借助光学或电磁感应原理,识别焊缝的位置与走向偏差,引导机械执行机构进行动态修正,确保焊枪始终对准焊缝中心。该单元还能记录每次焊接的参数曲线,为后续质量追溯与工艺优化提供数据支持,帮助操作人员积累经验,提升同类工件的焊接一致性。激光切割工作站在保证高效切割的同时,也实现了低能耗和环保运行。
工业机器人弧焊工作站凭借精密的机械结构与智能控制系统,为焊接作业带来了稳定且高效的解决方案。其搭载的高精度焊接机器人,可实现 0.02mm 级的运动重复定位精度,确保每一道焊缝的一致性与规整度。工作站配备的自适应焊接系统,能实时感知工件的细微变形与位置偏差,并通过动态参数调整,自动补偿焊接轨迹,有效降低因工件定位误差导致的焊接缺陷。同时,模块化的设计让工作站可根据生产需求灵活搭配不同规格的焊枪、送丝机与保护气体装置,适配碳钢、不锈钢、铝合金等多种材质的焊接作业,满足汽车制造、工程机械、压力容器等领域的多样化生产要求。保护气体防止熔池受空气污染。上海激光切割工作站销售
弧焊工作站的工作原理主要基于电弧放电原理。合肥移动式焊接工作站销售
性能监测与维护提示系统通过对机器人运行状态的实时监测,提前发现潜在问题并指导维护工作。系统内置振动传感器、温度传感器等,持续采集机械臂关节的运行温度、振动频率、电机电流等数据,与预设的正常范围对比分析。当监测到异常数据时,如关节温度过高、振动异常,系统会通过指示灯和显示屏发出报警,并显示可能的故障原因和处理建议。同时,系统根据设备运行时间和作业量,自动生成维护计划,提示操作人员进行润滑油更换、部件检查等常规保养。这种主动预防式的维护模式,能有效降低设备故障率,提高生产连续性。合肥移动式焊接工作站销售