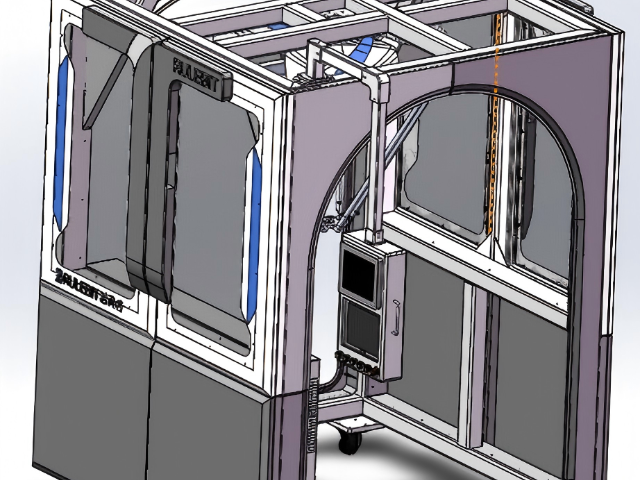
若贝特湿巾贴盖设备依托先进的视觉机器人协同控制系统,实现高柔性贴盖作业。视觉组件可识别多种类型的特征标志,即便在光照波动条件下仍能稳定输出坐标数据,使贴盖位置可在工作范围内任意指定。并联机器人以100次/分钟的速率完成拾取与贴附,运动轨迹平滑且重复精度达±0.05mm和±0.2°。涂胶模块采用闭环控制,胶量输出稳定,路径连续无突变,有效改善封装质量。整机工作在AC220V±10%、50Hz±5的供电条件下,抗干扰能力强。通信方面提供以太网、RS-232、RS485和CAN接口,满足设备互联与生产信息化管理需求,适用于高卫生要求的湿巾包装产线。电压允许±10%波动,设备在欠压或过压时仍可正常工作。湖南附近湿巾贴盖设备平台

该设备采用视觉定位与运动控制深度融合的方案,实现智能化贴盖操作。通过高分辨率相机捕捉工件特征,经图像处理获得高精度坐标,使贴盖位置可在工作区域内任意设定。并联机器人运动速度快、重复性佳,稳定实现100次/分钟的工作节拍,且定位误差控制在±0.05mm和±0.2°范围内。涂胶轨迹经由高阶曲线拟合,平滑流畅,胶线宽度一致性强。设备在AC220V±10%电压和50Hz±5%频率条件下运行稳定。通信方面集成以太网、RS-232、RS485及CAN接口,可适应多种网络拓扑结构,满足现代智能制造对设备互联和信息集成的需求。河北购买湿巾贴盖设备厂家电话CAN总线抗干扰能力强,适用于电磁环境复杂场景。
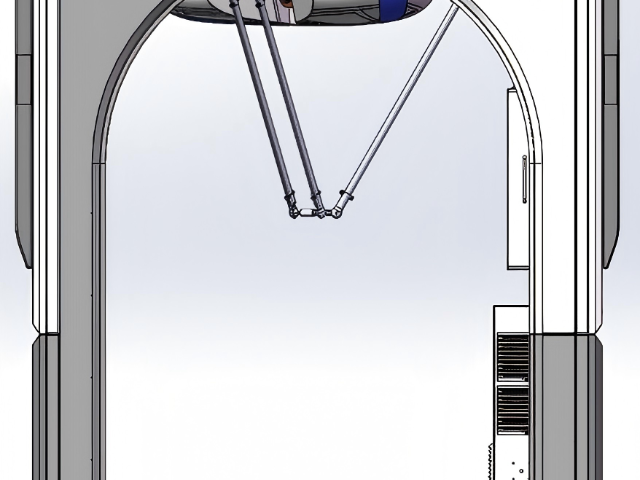
若贝特湿巾贴盖设备是精度、速度与智能结合的典范。其新系统架构依托视觉技术实现对产品特征点的精 准识别,从而允许机器人任意选取的贴盖位置,极大地增强了生产线的适应能力。并联机器人以100次/分钟的节拍进行高速、柔和的“平取平放”操作,彻底杜绝了产品损伤。惊人的重复定位精度(±0.05mm, ±0.2°)与平滑的涂胶轨迹共同保证了每一条生产线的输出品质。设备支持宽范围电网输入,并标配以太网、RS-232、RS485和CAN接口,为构建数字化、互联互通的智能工厂提供了强大的设备基础。
若贝特湿巾贴盖设备基于模块化系统架构开发,涵盖视觉识别、机器人运动与涂胶控制单元。视觉部分能够快速识别容器特征并计算贴盖位置,支持在线位置调整与配方调用。并联机器人凭借其高加速度与低移动质量,实现100次/分钟作业节奏,重复定位误差不超过±0.05mm和±0.2°。涂胶轨迹经非均匀有理B样条(NURBS)插值优化,连续光滑无尖点。电气系统兼容AC220V±10%电压输入和50Hz±5%频率波动。设备标配以太网、RS-232、RS485及CAN接口,可接入工厂物联网平台,支持远程参数设置与故障诊断,适用于精益化生产管理。RS485多节点网络节省布线成本,提高车间灵活性。

本设备通过融合机器视觉与精密运动控制,提供高性能贴盖解决方案。视觉系统识别容器特征点并输出坐标信息,实现贴盖位置的任意可编程设定。并联机器人凭借高刚度与低惯量特性,达到100次/分钟的工作节奏,定位精度稳定于±0.05mm和±0.2°。涂胶路径经由算法优化,连续平滑,胶线质量一致性强。设备设计兼容AC220V±10%电压输入和50Hz±5%频率波动。配备以太网、RS-232、RS485和CAN多种接口,支持设备联网与生产信息集成,适用于高节拍、高精度的湿巾产品包装线。宽频供电设计(50Hz±5%),增强设备适应性。湖南附近湿巾贴盖设备平台
重复定位精度±0.05mm,减少调整频次,提高效率。湖南附近湿巾贴盖设备平台
该设备基于机器视觉与高动态机器人系统,专为精密贴盖工艺开发。视觉单元能够识别多种特征图案,定位准确,支持非固定位置贴盖。并联机器人结构优化、动力强劲,工作速率100次/分钟,重复定位精度达±0.05mm和±0.2°。涂胶路径经运动规划平滑处理,无拐点或停顿,胶线均匀密封可靠。设备额定电压AC220V±10%,频率50Hz±5%,电网适应性良好。集成以太网、RS-232、RS485和CAN接口,便于接入工厂自动化网络,实现远程操作与实时数据采集,满足智能制造需求。湖南附近湿巾贴盖设备平台