- 品牌
- 台达
- 型号
- 面议
- 结构形式
- 模块式,整体式
- 安装方式
- 现场安装,控制室安装
- LD指令处理器
- 软PLC,硬PLC
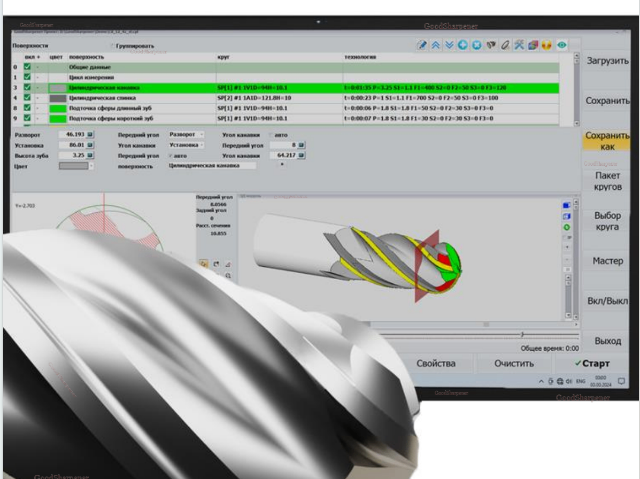
磨床运动控制中的砂轮修整控制技术是维持磨削精度的,其是实现修整器与砂轮的相对运动,恢复砂轮的切削性能。砂轮在磨削过程中会出现磨损、钝化(磨粒变圆)与堵塞(切屑附着),需定期通过金刚石修整器进行修整,修整周期根据加工材料与磨削量确定(如加工不锈钢时每磨削50件修整一次)。修整控制的关键参数包括修整深度(0.001-0.01mm)、修整速度(0.1-1m/min)与修整次数(1-3次):例如修整φ400mm的白刚玉砂轮时,修整器以0.5m/min的速度沿砂轮端面移动,每次修整深度0.003mm,重复2次,可去除砂轮表面0.006mm的磨损层,恢复砂轮的锋利度。现代磨床多采用“自动修整”功能:系统通过扭矩传感器监测砂轮磨削扭矩,当扭矩超过预设阈值(如额定扭矩的120%)时,自动停止磨削,启动修整程序——修整器移动至砂轮位置,按预设参数完成修整后,自动返回原位,砂轮重新开始磨削。此外,部分磨床还具备“修整补偿”功能:修整后砂轮直径减小,系统自动补偿Z轴(砂轮进给轴)的位置,确保工件磨削尺寸不受砂轮直径变化影响(如砂轮直径减小0.01mm,Z轴自动向下补偿0.005mm,保证工件厚度精度)。无锡铣床运动控制厂家。蚌埠涂胶运动控制厂家
闭环控制的精度取决于反馈装置的性能,常见的反馈装置包括编码器、光栅尺、磁栅尺等,其中编码器因体积小、安装方便、成本较低,广泛应用于伺服电机的位置反馈;而光栅尺则具有更高的测量精度,常用于对定位精度要求极高的非标设备中,如半导体晶圆加工设备。在闭环控制方案设计中,还需合理设置控制参数,如比例系数、积分系数、微分系数(PID参数),以确保系统的响应速度与稳定性,避免出现超调、振荡等问题。通过优化PID参数,可使闭环控制系统在面对扰动时快速调整,恢复到稳定状态,保障设备的连续稳定运行。江苏非标自动化运动控制维修湖州车床运动控制厂家。

车床的多轴联动控制技术是实现复杂曲面加工的关键,尤其在异形零件(如凸轮、曲轴)加工中不可或缺。传统车床支持X轴与Z轴联动,而现代数控车床可扩展至C轴(主轴旋转轴)与Y轴(径向附加轴),形成四轴联动系统。以曲轴加工为例,C轴可控制主轴带动工件分度,实现曲柄销的相位定位;Y轴则可控制刀具在径向与轴向之间的倾斜运动,配合X轴与Z轴实现曲柄销颈的车削。为保证四轴联动的同步性,系统需采用高速运动控制器,运算周期≤1ms,通过EtherCAT或Profinet等工业总线实现各轴之间的实时数据传输,确保刀具轨迹与预设CAD模型的偏差≤0.003mm。在实际应用中,多轴联动还需配合CAM加工代码,例如通过UG或Mastercam软件将复杂曲面离散为微小线段,再由数控系统解析为各轴的运动指令,终实现一次装夹完成凸轮的轮廓加工,相比传统多工序加工,效率提升30%以上。
磨床的恒压力磨削控制技术在薄壁、易变形工件(如铝合金壳体、铜制薄片)加工中发挥关键作用,其是保证磨削过程中砂轮对工件的压力恒定,避免工件因受力不均导致的变形。薄壁工件的壁厚通常小于5mm(如手机中框壁厚1.5mm),磨削时若压力过大(超过50N),易产生弯曲变形(变形量>0.01mm),影响尺寸精度;压力过小则磨削效率低,表面易出现划痕。恒压力控制通过以下方式实现:在Z轴(砂轮进给轴)上安装力传感器,实时采集砂轮与工件的接触压力,当压力偏离预设值(如30±5N)时,系统调整Z轴进给速度——压力过大时降低进给速度(如从0.005mm/s降至0.003mm/s),压力过小时提升进给速度,确保压力稳定在设定范围。例如加工厚度2mm、直径100mm的铝合金薄片时,预设磨削压力25N,系统通过力传感器反馈实时调整Z轴进给,终薄片的平面度误差≤0.003mm,厚度公差控制在±0.005mm,相比传统恒进给磨削,变形量减少60%以上。此外,恒压力控制还可用于砂轮的“无火花磨削”阶段:磨削后期,降低压力(如5-10N),以极低的进给速度进行抛光,进一步提升工件表面质量(粗糙度从Ra0.4μm降至Ra0.1μm)。杭州点胶运动控制厂家。

数控车床的主轴运动控制是保障工件加工精度与表面质量的环节,其需求是实现稳定的转速调节与的扭矩输出。在金属切削场景中,主轴需根据加工材料(如不锈钢、铝合金)、刀具类型(硬质合金刀、高速钢刀)及切削工艺(车削外圆、镗孔)动态调整参数:例如加工度合金时,需降低主轴转速以提升切削扭矩,避免刀具崩损;而加工轻质铝合金时,可提高转速至3000-5000r/min,通过高速切削减少工件表面毛刺。现代数控车床多采用变频调速或伺服主轴驱动技术,其中伺服主轴系统通过编码器实时反馈转速与位置信号,形成闭环控制,转速误差可控制在±1r/min以内。此外,主轴运动控制还需配合“恒线速度切削”功能——当车削锥形或弧形工件时,系统根据刀具当前位置的工件直径自动计算主轴转速,确保刀具切削点的线速度恒定(如保持150m/min),避免因直径变化导致切削力波动,终实现工件表面粗糙度Ra≤1.6μm的高精度加工。滁州铣床运动控制厂家。蚌埠涂胶运动控制厂家
嘉兴点胶运动控制厂家。蚌埠涂胶运动控制厂家
以瓶盖旋盖设备为例,运动控制器需控制旋盖头完成下降、旋转旋紧、上升等动作,采用S型加减速算法规划旋盖头的运动轨迹,可使旋盖头在下降过程中从静止状态平稳加速,到达瓶盖位置时减速,避免因冲击导致瓶盖变形;在旋转旋紧阶段,通过调整转速曲线,确保旋紧力矩均匀,提升旋盖质量。此外,轨迹规划技术还需与设备的实际负载特性相结合,在规划过程中充分考虑负载惯性的影响,避免因负载突变导致的运动超调或失步。例如,在搬运重型工件的非标设备中,轨迹规划需适当降低加速度,延长加速时间,以减少电机的负载冲击,保护设备部件,确保运动过程的稳定性。蚌埠涂胶运动控制厂家
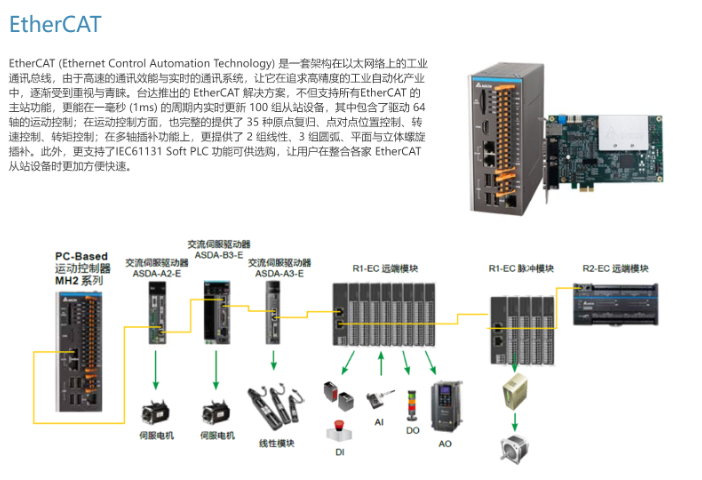
在非标自动化运动控制中,多轴协同控制技术是实现复杂动作流程的关键,尤其在涉及多维度、高精度动作的场景中,如工业机器人、数控加工中心等设备,多轴协同控制的精度直接决定了设备的加工能力与产品质量。多轴协同控制的在于确保多个运动轴在时间与空间上的动作同步,避免因各轴之间的动作延迟或偏差导致的生产故障。例如,在五轴联动数控加工设备中,运动控制器需同时控制X、Y、Z三个线性轴与A、C两个旋转轴,实现刀具在三维空间内的复杂轨迹运动,以加工出具有复杂曲面的零部件。为确保加工精度,运动控制器需采用坐标变换算法,将刀具的运动轨迹转换为各轴的运动指令,并通过实时运算调整各轴的运动速度与加速度,使刀具始终保持恒定的...
- 淮南车床运动控制开发 2026-03-21
- 淮南铣床运动控制维修 2026-03-21
- 泰州玻璃加工运动控制开发 2026-03-21
- 镇江专机运动控制调试 2026-03-21
- 徐州石墨运动控制定制开发 2026-03-21
- 湖州复合材料运动控制调试 2026-03-21
- 常州铝型材运动控制编程 2026-03-21
- 杭州碳纤维运动控制维修 2026-03-21
- 蚌埠点胶运动控制开发 2026-03-21
- 合肥磨床运动控制维修 2026-03-21
- 苏州包装运动控制厂家 2026-03-20
- 蚌埠木工运动控制定制开发 2026-03-20
- 蚌埠复合材料运动控制定制 2026-03-20
- 江苏铣床运动控制 2026-03-20
- 苏州半导体运动控制 2026-03-20
- 马鞍山车床运动控制编程 2026-03-20




- 镇江专机运动控制调试 03-21
- 徐州石墨运动控制定制开发 03-21
- 湖州复合材料运动控制调试 03-21
- 常州铝型材运动控制编程 03-21
- 杭州碳纤维运动控制维修 03-21
- 蚌埠点胶运动控制开发 03-21
- 泰州非标自动化数控系统厂家 03-21
- 合肥磨床运动控制维修 03-21
- 扬州钻床数控系统定制 03-20
- 浙江木工运动控制开发 03-20