瑕疵检测系统在锂电池极片生产中的应用,是保障锂电池极片质量的关键,直接影响锂电池的容量与安全性能。锂电池极片的漏涂、褶皱、断栅、毛刺、厚度不均等瑕疵,会导致电芯内部短路、容量衰减,甚至引发热失控风险,传统人工检测难以识别微米级的断栅、漏涂等缺陷,且检测效率低下。该系统采用高精度视觉检测、激光测厚技术...
瑕疵检测系统基本参数
- 品牌
- 熙岳智能
- 型号
- 瑕疵检测系统
- 适用范围
- 零件瑕疵显微检测系统
- 产地
- 中国南京
- 厂家
- 南京熙岳智能科技有限公司
瑕疵检测系统企业商机
一个成功的瑕疵检测系统远不止是算法的堆砌,更是硬件、软件与生产环境深度融合的复杂工程系统。系统集成涉及机械设计(相机、光源的安装支架,防震、防尘、冷却设计)、电气工程(布线、安全防护、与PLC的I/O通信)、光学工程(光路设计、镜头选型)以及软件开发和部署。软件开发平台通常基于成熟的商业机器视觉库(如Halcon, OpenCV, VisionPro)或深度学习框架(TensorFlow, PyTorch)进行二次开发,提供图形化的人机交互界面(HMI),方便用户配置检测参数(ROI区域、阈值)、管理产品型号、查看检测结果与统计报表。软件架构需考虑实时性、模块化、可维护性和可扩展性。关键挑战包括:确保系统在恶劣工业环境(振动、温度变化、电磁干扰、粉尘)下的长期稳定性;设计直观高效的调试与标定工具;实现与上层MES(制造执行系统)/ERP系统的数据对接,上传质量数据;以及建立完善的日志系统与远程诊断维护功能。系统集成能将先进的检测算法包装成稳定、易用、可靠的“黑盒”工具,使其能被生产线操作员和技术人员有效驾驭。像素级分析能定位瑕疵的精确坐标和大小。四川篦冷机工况瑕疵检测系统

在深度学习普及之前,瑕疵检测主要依赖于一系列经典的数字图像处理算法。这些算法通常遵循一个标准的处理流程:图像预处理、特征提取与分类决策。预处理包括灰度化、滤波(如高斯滤波去噪、中值滤波去椒盐噪声)、图像增强(如直方图均衡化以提高对比度)等,旨在改善图像质量。特征提取是关键步骤,旨在将图像转换为可量化的特征向量,常用方法包括:基于形态学的操作(如开运算、闭运算)检测颗粒或孔洞;边缘检测算子(如Sobel、Canny)寻找划痕或边界缺损;纹理分析算法(如灰度共生矩阵GLCM、局部二值模式LBP)鉴别织物或金属表面的纹理异常;基于阈值的分割(如全局阈值、自适应阈值)分离前景与背景;以及斑点分析、模板匹配(归一化互相关)等。通过设定规则或简单的分类器(如支持向量机SVM)对提取的特征进行判断。这些传统方法在场景可控、光照稳定、瑕疵特征明显且与背景差异大的应用中表现良好,且具有算法透明、可预测、计算资源要求相对较低的优点。然而,其局限性也显而易见:严重依赖经验进行特征工程,算法泛化能力差,对光照变化、产品位置轻微偏移、复杂背景或新型未知瑕疵的鲁棒性不足,难以应对日益增长的检测复杂性需求。徐州传送带跑偏瑕疵检测系统性能深度学习模型通过大量样本训练,可检测复杂瑕疵。

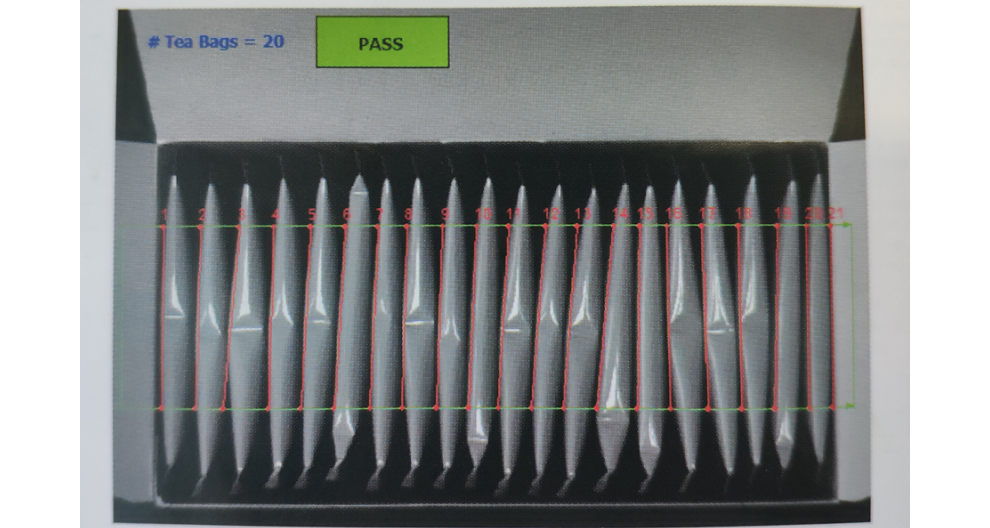
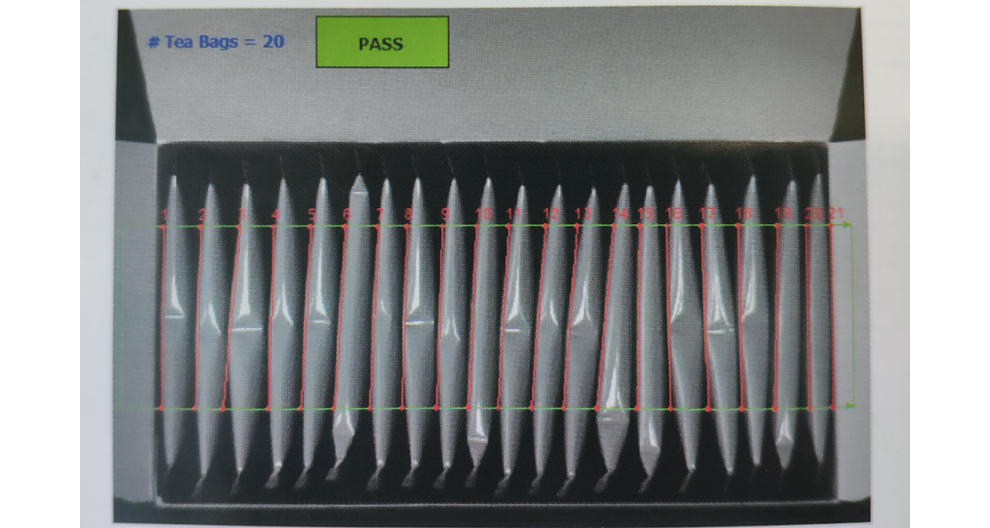
系统的硬件是确保图像质量的基础,直接决定了检测能力的上限。成像单元中,工业相机的选择(面阵或线阵)取决于检测速度与精度要求;镜头的光学分辨率、景深和畸变控制至关重要;而光源方案的设计更是“灵魂”所在,其目的是创造比较好的对比度,使瑕疵“无处遁形”。例如,对透明材料的气泡检测常用背光,对表面划痕采用低角度环形光,对反光元件则用穹顶无影光。此外,光谱范围也从可见光扩展到X光(用于内部缺陷)、红外(用于热斑)及高速摄像(用于运动分析)。数据处理单元需具备强大的计算能力和稳定的I/O接口,以应对海量图像数据的实时处理。随着边缘计算和嵌入式AI的发展,许多智能相机和工控机已集成高性能GPU或AI芯片(如NPU),实现了在数据采集端的实时推理,减少了系统延迟与带宽压力,为在高速生产线上部署复杂的深度学习模型提供了硬件可能。
现代瑕疵检测系统每天产生海量的图像数据与检测结果数据。这些数据若*用于实时分拣,则其潜在价值被极大浪费。通过构建数据管道,将这些数据上传至边缘服务器或云端,进行更深入的分析,可以挖掘出巨大价值。例如:1)质量追溯与根因分析:将特定瑕疵模式(如周期性出现的划痕)与生产线上的设备ID、工艺参数(温度、压力、速度)、操作员、原材料批次等信息关联,通过数据挖掘(如关联规则分析)快速定位问题根源。2)过程能力监控:统计过程控制(SPC)图表可以实时监控关键质量特性的波动,预警工艺漂移。3)预测性维护:分析瑕疵率随时间或设备运行周期的变化趋势,预测关键部件(如镜头、光源、机械部件)的性能衰减或故障,提前安排维护。4)模型持续优化:将系统在实际运行中遇到的难例(漏检或误检样本)自动收集、标注(可能需要人工复核),形成增量数据集,用于定期重新训练和优化深度学习模型,使系统具备自我进化能力。云计算平台提供了近乎无限的计算与存储资源,使得复杂的分析、大规模模型训练成为可能,推动了瑕疵检测从“感知”向“认知”和“决策”的智能演进。瑕疵视觉检测利用高清相机捕捉产品表面图像。

随着产品结构的日益复杂和精度要求的不断提升,凭2D图像信息已无法满足所有检测需求。3D视觉技术在瑕疵检测中的应用正迅速增长。通过激光三角测量、结构光或飞行时间(ToF)等原理,3D传感器能快速获取物体表面的三维点云数据。这带来了极大的优势:它可以直接测量高度、平面度、共面性、体积等尺寸信息,不受物体表面颜色和纹理变化的影响。例如,检测手机外壳的装配缝隙、电池的鼓包、焊接点的饱满度,或是注塑件的缩痕,3D检测是直接有效的方法。更进一步,将2D视觉的高分辨率纹理、颜色信息与3D视觉的精确形貌信息相结合,即多传感器融合,能构建更多的产品数字孪生体,实现“所见即所得”的全维度检测。例如,在检测一个精密齿轮时,2D相机可以检查齿面的划痕和锈蚀,而3D传感器可以精确测量每个齿的轮廓度和齿距误差。这种融合系统通过数据配准和联合分析,能发现单一传感器无法识别的复合型缺陷,提升了检测系统的能力和可靠性,尤其适用于精密制造和自动化装配的在线验证。多光谱成像能揭示可见光以外的缺陷信息。苏州传送带跑偏瑕疵检测系统价格
机器学习算法能自动识别划痕、凹坑等常见缺陷。四川篦冷机工况瑕疵检测系统
全自动检测并非在所有场景下都是比较好解。人机协作正在催生新型的、效率更高的质检模式。一种常见模式是“机器筛查,人工复判”:系统高速筛选出所有可疑品(包括确定瑕疵品和不确定品),再由人工集中对可疑品进行**终判定。这极大地减轻了人工长时间目检的负担,使其精力集中于决策环节,整体效率和准确性得以提升。另一种模式是增强现实辅助质检:工人佩戴AR眼镜,摄像头捕捉产品图像,系统实时分析并在视野中高亮标注出潜在瑕疵区域,指导工人快速定位和判断。这种方式结合了机器的稳定性和人类的灵活性,适用于小批量、多品种、工艺复杂的产品。在这种协作模式下,系统设计需格外注重人机交互界面(HMI)的友好性,复判结果应能便捷地反馈给系统,用于模型的自学习和优化。这种人机共存的质检体系,不仅在技术上更易实现,在经济上也更具灵活性,是当前许多企业从纯人工向全自动过渡的理想路径。四川篦冷机工况瑕疵检测系统
与瑕疵检测系统相关的文章

安徽传送带跑偏瑕疵检测系统功能
- 南京电池瑕疵检测系统价格 2026-05-22
- 山东压装机瑕疵检测系统案例 2026-05-21
- 四川瑕疵检测系统品牌 2026-05-21
- 无锡密封盖瑕疵检测系统 2026-05-21
- 无锡冲网瑕疵检测系统优势 2026-05-21
- 常州瑕疵检测系统产品介绍 2026-05-21
- 山东榨菜包瑕疵检测系统技术参数 2026-05-21
- 徐州木材瑕疵检测系统品牌 2026-05-21
- 四川铅酸电池瑕疵检测系统优势 2026-05-21
- 扬州电池片阵列排布瑕疵检测系统功能 2026-05-21
- 南京冲网瑕疵检测系统定制价格 2026-05-21
- 山东铅酸电池瑕疵检测系统售价 2026-05-21
与瑕疵检测系统相关的产品


与瑕疵检测系统相关的新闻
-
常州密封盖瑕疵检测系统定制 2026-05-20 17:01:08软件算法引擎是瑕疵检测系统的 “大脑”,其性能优劣决定了系统的智能化水平与鲁棒性。在实际生产中,瑕疵形态多样、背景复杂,且存在大量伪影干扰,传统算法难以应对。现代 AI 瑕疵检测系统融合了深度学习、迁移学习与小样本学习等前沿技术。通过对海量正负样本的训练,模型能自动提取纹理、形状、灰度等高阶特征,实...
-
传送带跑偏瑕疵检测系统趋势 2026-05-20 16:01:06汽车制造业是瑕疵检测系统的深度应用场景,其应用覆盖了从冲压件、铸件到内饰件的全产业链。汽车零部件对尺寸精度和表面质量要求极高,传统人工检测难以满足大批量、高质量的需求。系统在冲压车间,可检测钣金件的划痕、变形、毛刺;在铸造车间,通过 X 射线检测技术,可无损发现内部的气孔、砂眼、裂纹;在内饰车间,可...
-
无锡铅酸电池瑕疵检测系统定制 2026-05-20 03:01:47在锂电池生产领域,瑕疵检测系统的应用贯穿极片、电芯、电池包全生产流程,是保障锂电池安全性能与使用寿命的重要防线。锂电池极片的漏涂、褶皱、断栅、毛刺等瑕疵,会导致电芯内部短路、容量衰减,甚至引发热失控风险;电芯的鼓包、焊接缺陷,电池包的装配错位、漏装等问题,直接影响电池包的整体性能。该系统针对锂电池生...
-
四川冲网瑕疵检测系统售价 2026-05-20 01:00:51瑕疵检测系统在电梯零部件生产中的应用,严格保障电梯零部件的精度与安全性,助力电梯安全运行。电梯零部件如电梯门、导轨、曳引机、安全钳等,对精度、强度要求极高,其表面的划痕、裂纹、变形、尺寸偏差、焊接缺陷等瑕疵,会影响电梯的运行稳定性与安全性,甚至引发安全事故。传统人工检测难以识别微小的裂纹、尺寸偏差等...
与瑕疵检测系统相关的问题
新闻资讯
产品推荐
-

无锡冲网瑕疵检测系统优势
2026-05-21 -
线扫激光定制机器视觉检测服务用途
2026-05-21 -

常州瑕疵检测系统产品介绍
2026-05-21 -
山东榨菜包瑕疵检测系统技术参数
2026-05-21 -

江苏分类实训平台价格
2026-05-21 -
福建传送带跑偏定制机器视觉检测服务趋势
2026-05-21 -
徐州木材瑕疵检测系统品牌
2026-05-21 -

四川铅酸电池瑕疵检测系统优势
2026-05-21 -

扬州电池片阵列排布瑕疵检测系统功能
2026-05-21