三维扫描仪的硬件只完成数据采集,后续的点云处理、模型重建与分析依赖专业软件。主流软件(如Geomagic、PolyWorks、CloudCompare)通常包含四大功能模块:数据预处理(去噪、滤波、拼接)、点云配准(将多视角数据对齐至同一坐标系)、模型重建(生成NURBS曲面或网格模型)与检测分析(对比CAD模型计算偏差、生成检测报告)。例如,在汽车检测中,软件可自动识别关键特征点(如孔位、边缘),计算其与理论位置的偏差,并生成彩色误差云图直观展示问题区域;在文化遗产保护中,软件支持纹理映射,将高分辨率照片贴合至3D模型,还原文物真实色彩与细节。此外,部分软件(如MeshLab、Blender)还提供模型修复、简化与优化功能,为3D打印或虚拟展示做准备。三维扫描仪可以用于创建虚拟现实环境中的真实物体。江苏国产三维扫描仪价格

医疗行业对个性化、准确化需求推动三维扫描技术深度渗透。在口腔医学中,口内扫描仪(如iTero)可在3分钟内获取全口牙齿三维数据,精度达20μm,直接生成隐形矫治器模型,替代传统硅橡胶取模,患者舒适度提升90%;在整形外科,3D扫描仪结合面部识别算法,可模拟隆鼻、削骨等手术效果,帮助医生与患者沟通方案;在康复医学中,扫描仪用于定制矫形器:通过扫描患肢形状,软件自动生成贴合人体工学的支具模型,打印材料从塑料升级为碳纤维,重量减轻60%的同时强度提升3倍。此外,在手术导航领域,激光扫描仪可实时构建患者体内部位三维模型,与术前CT/MRI数据融合,辅助医生准确定位病灶,如脑部疾病切除手术中,误差控制在1mm以内,明显降低手术风险。江苏国产三维扫描仪价格在航空航天领域,三维扫描用于检测飞机部件的磨损和变形。

传统三维扫描仪因体积大、操作复杂、价格高昂,主要应用于工业领域。近年来,随着芯片算力提升与光学技术进步,便携式、消费级扫描仪逐渐普及。手持式扫描仪(如Artec Eva、Creaform HandySCAN)重量不足1kg,可单手操作,通过内置电池与无线传输模块,实现“随时随地”扫描;其精度虽略低于工业级设备(达0.1mm),但已满足逆向工程、文物记录等场景需求。手机集成式扫描仪则进一步降低门槛:通过搭载ToF传感器或结构光模组(如iPhone的LiDAR),普通用户可用手机扫描物体生成简易三维模型,用于3D打印、AR展示等创意应用。消费级扫描仪的软件也更加友好:例如,支持一键导出STL/OBJ格式文件,兼容主流3D打印软件;或内置AI修复功能,自动填补孔洞、平滑表面,降低用户学习成本。未来,随着5G与边缘计算的发展,扫描仪将实现“扫描-上传-处理-分享”全流程云端化,推动三维数字化从专业领域走向大众生活。
三维扫描仪的标准化是推动行业健康发展的关键。目前,国际标准化组织(ISO)已发布多项相关标准,涵盖术语定义(如ISO 17100)、精度测试方法(如ISO 10360)、数据格式(如STL、STEP)等领域;国内方面,全国工业测量控制与自动化标准化技术委员会(SAC/TC124)也制定了多项行业标准,如《三维扫描仪通用技术条件》(GB/T 34894-2017),对设备的精度、重复性、环境适应性等指标做出明确规定。标准化不只为用户选购设备提供依据,也促进了不同品牌设备间的数据互通与协同工作。例如,在跨企业合作中,统一的数据格式可避免模型转换导致的精度损失,提升供应链效率;在公共安全领域,标准化的扫描数据可为事故调查、犯罪侦查等提供通用证据格式。三维扫描仪可大幅缩短产品开发周期,提升设计效率。
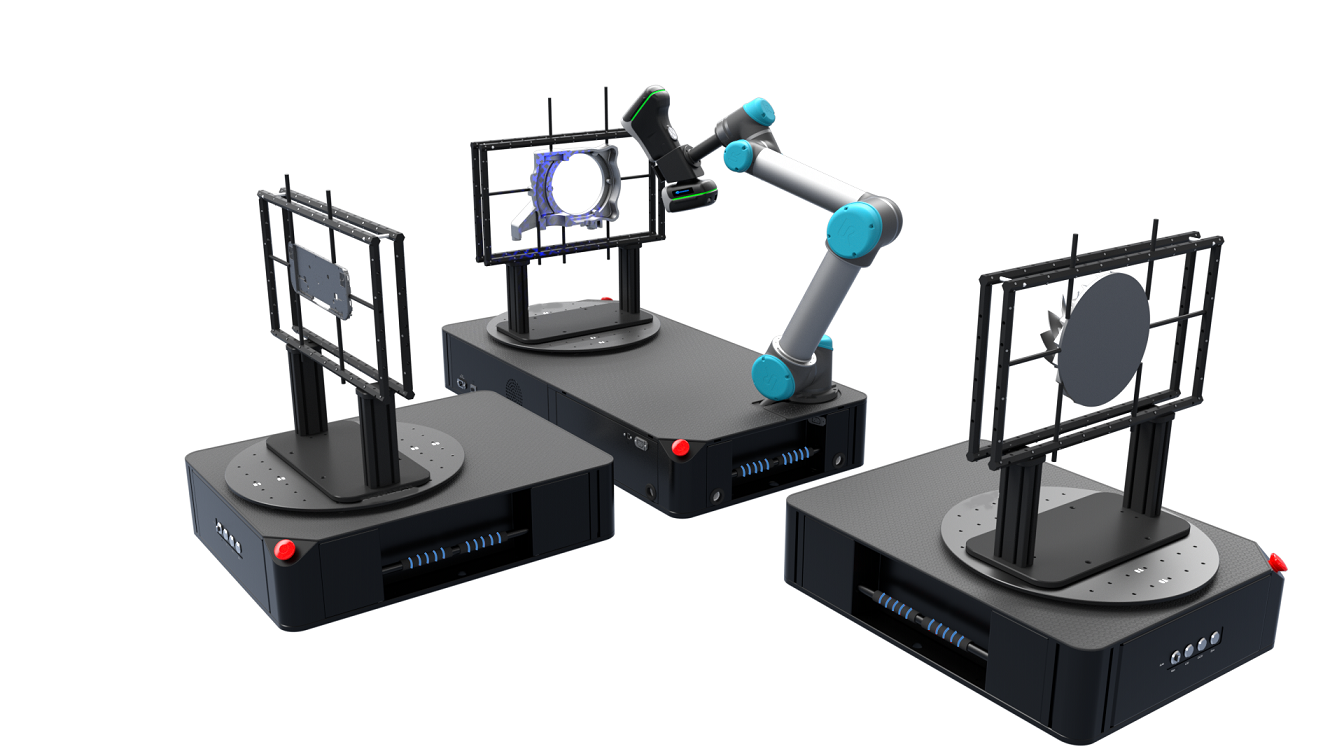
三维扫描仪的硬件系统由发射模块、接收模块、数据处理单元及辅助组件构成。发射模块是关键部件之一:激光扫描仪采用高功率脉冲激光器或半导体激光器,发射波长通常为532nm(绿光)或1064nm(红外光),以平衡穿透力与精度;结构光扫描仪则依赖DLP投影仪或LCD屏幕,投射高对比度图案(如格雷码、相移条纹);摄影测量系统通过多台工业相机组成阵列,同步捕捉物体不同角度的图像。接收模块方面,激光扫描仪使用光电二极管或APD(雪崩光电二极管)检测反射信号,结构光扫描仪则通过CMOS/CCD传感器记录图案变形,摄影测量系统依赖高分辨率相机与镜头组。数据处理单元包括嵌入式计算机或外接工作站,负责实时解算点云数据、去噪、滤波与模型重建。辅助组件如旋转台、标记点、校准板等,用于提升扫描效率与精度。硬件的集成度与材料选择(如碳纤维机身、防抖镜头)直接影响设备性能与稳定性。三维扫描仪能高效捕捉复杂曲面和精细纹理细节。江苏国产三维扫描仪价格
三维扫描仪在机械工程中用于逆向工程和零件复制。江苏国产三维扫描仪价格
三维扫描仪的软件系统是数据转化的“大脑”,涵盖数据采集、处理、分析与可视化四大模块。采集阶段,软件需与硬件深度协同:例如,激光扫描仪软件需控制激光发射频率、接收窗口时间,并实时同步传感器位置数据(如通过IMU或编码器);结构光扫描仪软件则需生成动态投影图案,并匹配相机采集的变形图像。处理阶段,关键算法包括点云配准(将多视角数据统一至同一坐标系)、去噪(剔除异常点)、滤波(平滑表面)、孔洞修复(填补缺失区域)等。重建阶段,软件通过Delaunay三角剖分或泊松重建算法生成网格模型,并支持纹理映射(将相机采集的彩色信息贴附至模型表面)。分析功能则包括尺寸测量(如长度、角度、曲率)、形变分析(对比不同时间点的模型差异)、逆向工程(生成CAD图纸)等。高级软件还集成AI模块,可自动识别物体特征(如孔洞、边缘),优化扫描路径,甚至通过深度学习预测缺失数据,明显提升效率。江苏国产三维扫描仪价格