时间同步,协同感知的基石 在当今主流的自动驾驶多传感器融合架构中,激光雷达、高清摄像头、毫米波雷达与惯导系统之间的时间同步精度,直接决定了数据融合的成败与效果。M39支持高精度PPS(秒脉冲)信号和GPRMC时间信息输出,能够为整个车辆感知系统提供统一、精确的时间基准。这意味着每一个激光点云、每一帧图像数据在采集的瞬间都可以被精确标记上UTC时间,确保后续的融合算法能够在时空维度上实现完美对齐,从而构建出准确、稳定、无重影的周边环境模型。这种硬件级的时间同步能力,是高级别自动驾驶系统实现精、准感知、正确决策和可靠控制的基础性保障。从乘用车到物流车,M39以卓、越性价比推动高精度定位技术普惠化。云南高集成度惯性导航系统服务

不止于定位,更是运动状态感知 迈普时空的惯导系统输出的远不止是位置和姿态信息,还有经过精密校准的三轴加速度计原始数据和三轴陀螺仪原始数据。这些高频的原始IMU数据,对于车辆的动力学分析、底盘控制算法的优化、驾驶行为的识别分析以及无人驾驶中的运动状态预测具有极高的研究价值和工程价值。通过深入挖掘这些数据,工程师可以更加全、面地理解车辆的运动特性,优化控制策略,提升行驶的平顺性和安全性。迈普时空的产品将高精度的GNSS信息与高采样率的IMU数据深度融合,为用户提供了从宏观运动轨迹到微观动态响应的完整数据视图。黑龙江激光陀螺惯性导航厂安装角自动补偿,M39消除机械装车误差,让量产车也能拥有实验室精度。

轻量化设计,M39助力空中平台 尽管M39主要面向车载应用市场,但它继承自迈普时空MINI2-INS系列产品的轻量化设计理念,使其同样可以适用于部分对载荷重量有严格限制的大型无人机和垂直起降飞行器平台。M39通过精巧的结构设计和高度集成的电路方案,在保证核、心性能指标的前提下,有效控制了整机的体积和重量,为对载荷非常敏感的空中作业平台提供了高精度的组合导航解决方案,可用于长航时的无人机巡查、电力巡线、油气管道监测、航空遥感测绘等多种空中任务,拓展了产品的应用边界。
深耦合技术,挑战信号极限 迈普时空在POS系列产品中不只实现了传统的GNSS/INS松组合模式,更支持更深层次的紧组合和深组合技术。在紧组合模式下,惯导系统不只利用GNSS解算出的位置和速度,更直接利用卫星的伪距、载波相位等原始观测值参与融合解算,即使在可见卫星数量少于4颗的情况下,也能辅助GNSS接收机维持定位解算。而在深组合层面,INS信息甚至可以辅助GNSS接收机的信号跟踪环路,提高在高动态、弱信号环境下的捕获和跟踪能力。这种多层次、深耦合的技术架构,使得POS系列能够在蕞具挑战性的信号环境中,依然保持连续可靠的定位输出。POS520,高精度闭环光纤陀螺与石英挠性加速度计的巅、峰技术组合。

专注高精度定位需求,迈普时空 POS520 以优、质硬件为基础,光纤陀螺与石英挠性加速度计确保姿态测量精、准,三星七频 GNSS 板卡保障位置定位可靠。200HZ 实时输出速率满足高频应用需求,里程计输入增强定位连续性,网线接入差分数据提升精度稳定性。全温补偿技术突破温度限制,PPS/GPRMC 输出保障时间同步,内置存储记录完整数据。全中文可视化软件降低操作难度,多后处理软件兼容方便数据二次分析,是各行业高精度导航定位的优、质选择。减震结构 + 光纤陀螺,迈普 POS620 实时解算,姿态位置精、准输出!河南高集成度惯性导航系统研发
完美兼容IE与GINS软件,POS520释放数据潜能,打造后处理极、致精度。云南高集成度惯性导航系统服务
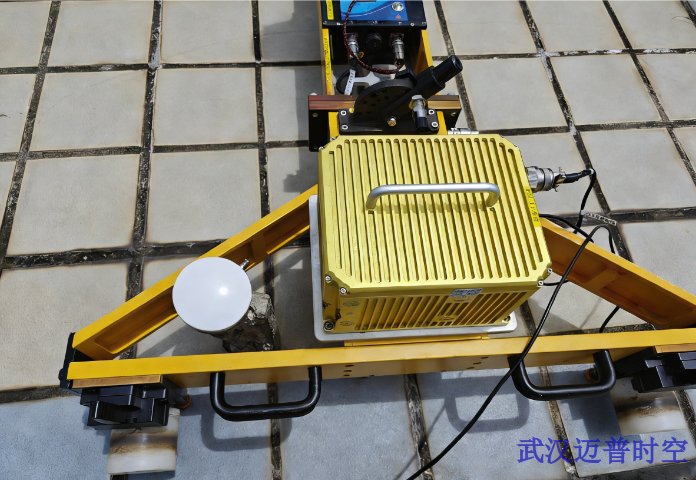
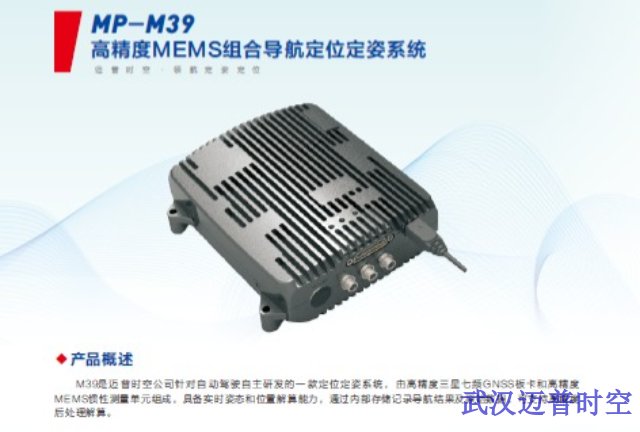
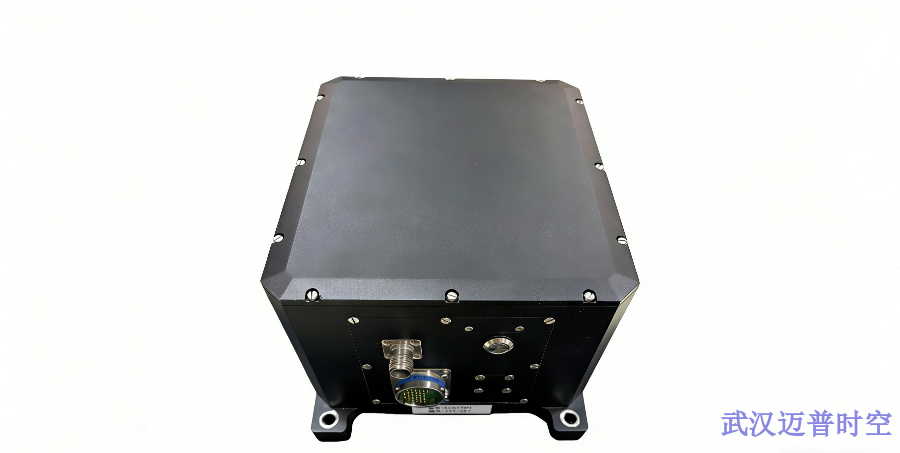
迈普时空 M39 凭借双天线板卡的多模多频段优势,覆盖 GPS、北斗、GLONASS 三大系统全核、心频段,信号接收能力强劲。作为自动驾驶专属定位定姿系统,其 MEMS 惯性测量单元与 GNSS 板卡深度融合,实时解算精度高。200HZ 串口与网口双输出模式,满足不同设备连接需求,CAN 总线轮速与里程计输入增强定位连续性。4G / 网线双路径获取差分数据,16G 大存储(可扩 32G)保障数据完整,全中文软件与多后处理软件兼容,安装标定便捷,为自动驾驶保驾护航。云南高集成度惯性导航系统服务
武汉迈普时空导航科技有限公司(简称“迈普时空”)是一家专业从事北斗精密定位定姿及应用的高、新、技、术企业。公司依托武汉大学卫星导航定位技术研究中心由中国工程院院士、“千人、计划”、“长江学者”、海外归国专、家5人合伙创立。公司致力于北斗GNSS/INS组合导航产品软硬件系统的集成、研发与应用,以定位定姿系统(POS)作为其GNSS/INS组合导航产品和服务的突破口,面向国内外车载、机载和船载的高精度定位定姿应用,在突破测绘遥感应用的基础上,为精密工程测量、移动测绘、高铁轨道几何形变检测等工程技术应用提供综合技术服务;为精细农业机械、无人机遥感、车载移动测绘、自动驾驶汽车等提供精、准定位定姿设备。