- 品牌
- 天盛德隆科技,守护神装备
- 型号
- EUDEMON
ADAS 在新能源汽车中的应用不仅是简单的功能移植,而是基于新能源汽车的特性进行了针对性适配与优化,实现安全性与经济性的双重提升。在安全性方面,新能源汽车的电池包布局导致车身重心较低且偏后,ADAS 系统通过调整传感器安装位置与算法参数,优化车辆的动态控制逻辑,例如在紧急制动时,根据电池包重量调整制动力度分配,避免车辆甩尾;在转向辅助时,针对新能源汽车电动助力转向的特性,优化转向力矩输出,提升操控精细度。在经济性方面,ADAS 系统与新能源汽车的能量回收系统深度联动:当 ACC 系统检测到前车减速时,自动调整能量回收强度,实现 “减速即充电”,提升续航里程;在坡道行驶时,HHC 与能量回收系统协同工作,坡道起步时通过能量回收替代部分制动,减少能量损耗。此外,新能源汽车的智能座舱系统与 ADAS 深度融合,通过中控屏、HUD 抬头显示、语音交互等方式,为驾驶员提供更直观的 ADAS 功能反馈,例如通过语音播报 “前方限速 60km/h,已自动调整能量回收强度”,让驾驶员实时掌握系统状态,提升人机交互体验。自适应灯光控制可根据车辆行驶环境和路况,自动调整灯光的亮度、角度等,提高夜间行车安全性。湖南ADAS驾驶辅助设备使用流程

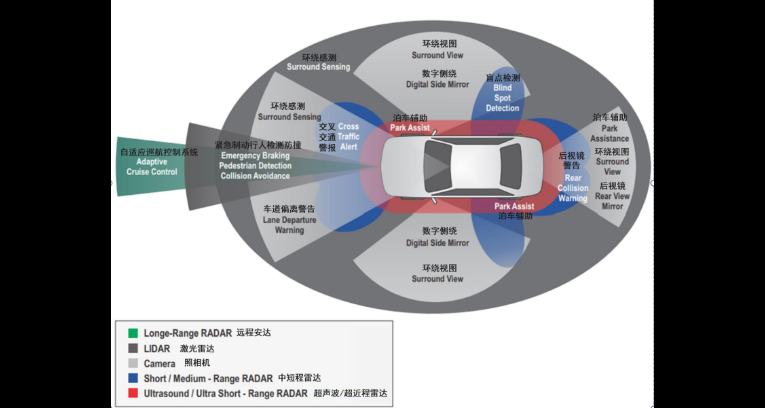
其功能矩阵涵盖驾驶全流程需求:前向碰撞预警(FCW)与自动紧急制动(AEB)组成几道安全防线,通过计算碰撞时间(TTC)判断风险,在驾驶员未响应时自动触发分级制动,欧盟实测数据显示可降低 38% 的追尾事故,部分系统还支持夜间行人与横穿自行车的精细识别;车道偏离预警(LDW)与车道保持辅助(LKA)则通过摄像头识别车道线,配合转向系统轻微干预,有效避免分心或疲劳导致的车道偏移,与自适应巡航(ACC)联动后,可实现全速域跟车与车道居中控制,让长途高速驾驶的疲劳度降低 80%。此外,盲区检测(BSD)通过后保险杠的毫米波雷达监测侧后方来车,以后视镜 LED 警示与方向盘震动提醒安全变道,其扩展功能后方交叉预警(RCTA)在停车场倒车场景中实用性极强;驾驶员疲劳检测(DFM)则借助车内摄像头捕捉面部特征与行车轨迹数据,通过 PERCLOS 指标判断疲劳等级,以多模态预警方式守护驾驶专注力。广西ADAS驾驶辅助设备厂商倒车影像通过车尾摄像头,为驾驶者提供清晰的车辆后方实时图像,使倒车操作更加安全便捷。
ADAS 驾驶辅助设备的抗干扰性能直接影响其在复杂环境下的工作稳定性,因此设备在研发过程中需重点强化抗干扰设计。常见干扰源包括恶劣天气(暴雨、大雾、强光)、道路环境(扬尘、积雪、模糊车道线)与电磁干扰(车辆电子系统、外界无线信号)。为应对这些干扰,ADAS 设备采用多元传感器融合技术 —— 例如摄像头与雷达互补,当摄像头在强光下无法清晰识别车道线时,雷达可通过距离测量辅助定位;激光雷达则凭借抗恶劣天气能力强的优势,提升复杂气候下的感知精度。在硬件设计上,传感器采用防水、防尘、抗强光的防护结构,确保在极端环境下正常工作;电路系统采用抗电磁干扰设计,避免车辆自身电子设备或外界信号干扰数据传输。软件层面,通过算法优化过滤噪声数据,提升对干扰信号的识别与排除能力。出色的抗干扰性能让 ADAS 设备能够适应各类复杂路况,保障辅助功能的持续可靠。
自动泊车辅助(APA)系统已从早期的半自动泊车升级为全自动泊车(HPP)与记忆泊车(HPP),大幅降低泊车难度,成为新手驾驶员的 “福音”。早期 APA 系统需要驾驶员控制车速与刹车,系统提供转向引导;而新一代 APA 系统通过车身周围的超声波传感器与摄像头,自动扫描车辆周围可用车位(平行车位、垂直车位、斜列车位),扫描范围可达车辆周围 8 米,识别准确率超过 90%,一旦找到合适车位,系统会自动规划泊车路径,通过控制转向、油门、刹车完成整个泊车过程,驾驶员只需按下确认键,无需其他操作,全程耗时*需 30-60 秒。全自动泊车(HPP)系统则进一步升级,支持 “遥控泊车” 功能,驾驶员可在车外通过手机 APP 控制车辆自动泊入或驶出车位,尤其适合狭小空间无法上下车的场景。记忆泊车(HPP)系统则能学习并记忆常用停车场的固定车位路线,当车辆再次进入该停车场时,系统可自动沿记忆路线行驶至目标车位并完成泊车,支持记忆多条路线,每条路线长度可达 1 公里。随着技术发展,自动泊车系统的适配场景不断扩展,从平整的停车场到略有坡度的场地,从标准车位到非标准狭小车位,均能实现精细泊车,泊车成功率较人工泊车提升 60% 以上。ADAS设备的智能预测功能,可以帮助驾驶员提前规划行车路线。

ADAS 的感知能力提升在于多传感器融合技术的持续演进,从早期的单一传感器应用,发展为 “毫米波雷达 + 摄像头” 基础融合、“激光雷达 + 摄像头 + 毫米波雷达” 高阶融合的技术路线。早期 ADAS 主要依赖单一摄像头或毫米波雷达,存在明显的技术短板:摄像头在夜间、恶劣天气下识别能力下降,毫米波雷达对静态物体、行人的识别精度不足。而基础融合方案通过两种传感器数据互补,摄像头弥补毫米波雷达对物体分类的不足,毫米波雷达弥补摄像头的环境适应性缺陷,使系统在多数场景下的识别准确率提升至 90% 以上。高阶融合方案则加入激光雷达,其点云数据的三维建模能力的,可精细还原环境中物体的形状、距离与运动轨迹,与摄像头、毫米波雷达的数据融合后,实现 “1+1+2>4” 的效果,在复杂场景(如交叉路口、施工路段、恶劣天气)下的感知可靠性提升至 95% 以上。此外,传感器融合技术还在向 “软件定义感知” 演进,通过 AI 算法优化传感器数据的权重分配,例如在晴天优先依赖摄像头获取高清图像,在雨天优先依赖激光雷达与毫米波雷达的距离数据,进一步提升感知系统的环境适应性与鲁棒性。前方行人加速预警系统能预判前方行人是否有突然加速横穿马路的行为,并提前预警。常州ADAS驾驶辅助设备怎么用
ADAS设备能够识别交通标志,为驾驶员提供准确的导航信息。湖南ADAS驾驶辅助设备使用流程
随着智能交通的发展,ADAS 驾驶辅助设备正迈向车路协同的新阶段。部分车型已能接收道路基础设施发送的实时信息,如前方路段的事故预警、红绿灯时间等,提前调整车辆状态。例如,收到红灯信号时,系统会建议比较好减速时机,实现平稳停车;得知前方拥堵时,自动规划比较好车道。这种车与路的智能联动,让驾驶更高效、更安全,为未来自动驾驶奠定了坚实基础。在复杂路口场景中,ADAS 的交叉路口辅助功能发挥关键作用。该功能通过多传感器融合技术,探测路口横向驶来的车辆,尤其是被建筑物、树木遮挡的车辆,在驾驶员视线被阻的情况下发出碰撞预警。配合 360 度全景影像,驾驶员能清晰看到路口各个方向的交通状况,在无信号灯控制的路口或视线不良的交叉路段,大幅降低横向碰撞风险。湖南ADAS驾驶辅助设备使用流程
- 湖南ADAS驾驶辅助设备使用流程 2026-05-28
- 汕尾ADAS驾驶辅助设备报价 2026-05-28
- 镇江ADAS驾驶辅助设备怎么用 2026-05-28
- 浙江ADAS驾驶辅助设备好处 2026-05-28
- 贵州ADAS驾驶辅助设备价格 2026-05-28
- 广东ADAS驾驶辅助设备介绍 2026-05-28
- 新疆ADAS驾驶辅助设备用途 2026-05-28
- 汕尾ADAS驾驶辅助设备用途 2026-05-27
- 徐州ADAS驾驶辅助设备厂家 2026-05-27
- 汕尾ADAS驾驶辅助设备定制 2026-05-27
- 汕尾ADAS驾驶辅助设备厂家 2026-05-27
- 海南ADAS驾驶辅助设备解决方案 2026-05-27