运动操控算法可通过以下多种方式提高自动化智能机器人实验台的操作精度:误差补偿与校正方面PID操控算法:比例(P)环节能迅速根据当前误差调整操控量,使机器人迅速向目标位置靠近;积分(I)环节可累积过去的误差,稳态误差,确保机器人**终能精确到达目标位置,而不会存在残留偏差;微分(D)环节能...
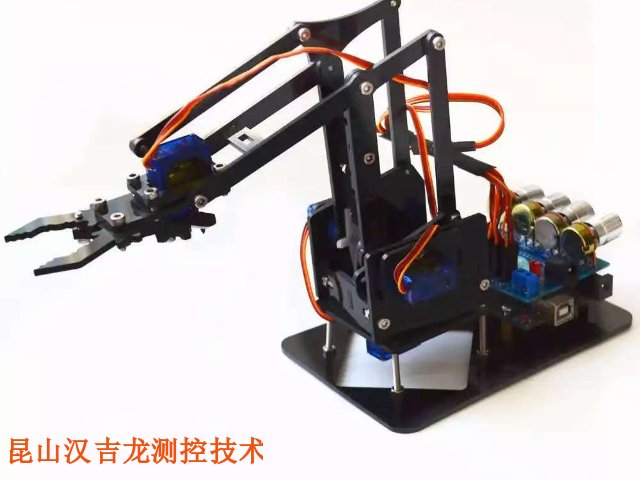
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
自动化智能机器人实验台的应用领域十分***,主要包括以下几个方面:工业制造领域生产工艺研发与优化:用于模拟汽车零部件、电子产品等的生产装配过程,研究新型生产工艺的可行性和优化空间,如探索更焊接、铆接工艺等。质量检测:搭载视觉检测系统等对产品进行外观缺陷检测、尺寸测量等,还能模拟产品在不同环境下的使用情况,进行可靠性测试,如对手机进行落、按键寿命等测试。物流与仓储管理:模拟智能物流系统中的货物搬运、存储和分拣过程,研发更物流调度算法和仓储布局方案,提高物流效率和准确性。科研教育领域高校教学实验:帮助学生理解机器人的运动、编程原理等知识,通过实践操作培养学生的动手能力和创新思维,如机械学生可进行机器人轨迹规划实验等。科研机构研发:为科研人员提供平台,开展机器人相关的前沿技术研究,如新型传感器研发、人工智能算法优化等,推动机器人技术的发展。学术研究实验:在物理、化学、等学科研究中,用于操作实验设备、采集数据等,如在化学实验中进行精确配比和反应操作。 实验台能为机器人创新供平台吗?自动化装置自动化智能机器人实验台内容

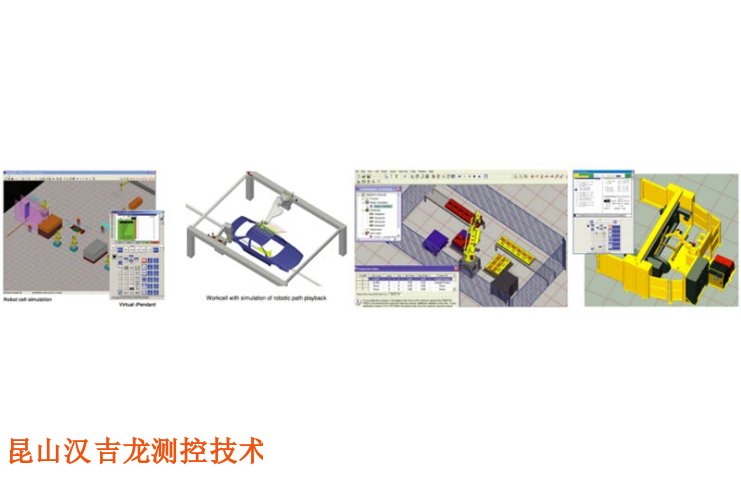
轨迹规划与优化方面模型预测操控算法(MPC):通过建立机器人的运动模型,预测机器人在未来一段时间内的运动轨迹,然后在每个操控周期内,基于预测结果和当前状态,优化计算出**优的操控输入序列,使机器人沿着**接近理想的轨迹运动,从而提高轨迹精度,减少运动偏差。基于样条曲线的轨迹规划算法:如采用B样条曲线等方法进行轨迹规划,可生成平滑、连续的运动轨迹,避免轨迹中的不连续点或突变,减少机器人在运动过程中的冲击和振动,保证机器人能够精确地按照预设轨迹运动,提高操作的平稳性和精度。增强系统鲁棒性方面滑模操控算法:在系统状态空间中定义一个滑动面,使系统在受到外部干扰或模型不确定性影响时,能迅速调整到滑动面上并保持在滑动面上运动,对系统的参数变化和外部干扰具有很强的鲁棒性,确保机器人在复杂的实验环境或存在干扰的情况下,仍能保持较高的操作精度。鲁棒操控算法:设计时充分考虑了系统模型的不确定性和可能存在的外部干扰,通过优化操控参数和结构,使系统在各种不确定因素下都能保持稳定的性能,保证机器人的运动精度不受影响,提高实验台在不同工况下的可靠性和准确性。 人机界面自动化智能机器人实验台供应商智能实验台能探索新方向吗?
自动化智能机器人实验台软件层面通信协议兼容性:实验台的操控系统通常会支持多种常见的通信协议,如TCP/IP、UDP用于网络通信,可与计算机、服务器等进行数据交互;Modbus协议能与许多工业设备进行数据通信;MQTT协议则适用于与物联网设备或云平台进行连接和数据传输,便于实现设备之间的信息交互和协同工作。驱动程序与软件接口:设备制造商一般会提供相应的驱动程序和软件接口,使实验台能够与其他设备进行通信和操控。通过这些驱动程序和接口,实验台可以与不同品牌和型号的设备进行集成,实现功能的扩展和协同。例如,实验台可以通过特定的软件接口调用外部传感器厂商提供的驱动程序,获取传感器数据。可扩展性和开放性:许多自动化智能机器人实验台的软件系统具有良好的可扩展性和开放性,支持二次开发。用户可以根据实际需求,在实验台的基础软件平台上编写自定义的程序和算法,实现与其他特定设备的兼容和协同操控,满足不同的实验需求和应用场景。
自动化智能机器人实验台与软件配合时可能会遇到兼容性、通信、数据处理等多方面的问题,以下是具体分析:兼容性问题系统兼容性:实验台的硬件驱动程序可能只支持特定版本的操作系统,而所使用的软件可能需要在其他系统环境下运行,就会出现不兼容的情况。例如,实验台的底层驱动基于Windows10开发,而某些软件*支持Windows11及以上版本。软件版本兼容性:不同软件版本之间可能存在兼容性问题。例如,机器人控制软件更新后,与之前版本的数据分析软件在数据接口或数据格式上发生变化,导致无法正常交互数据。硬件与软件兼容性:新的软件功能可能需要硬件具备更高的性能或特定的功能支持,若实验台硬件无法满足,就会出现问题。如软件更新后需要实验台的处理器具备更高的运算速度来处理复杂的图像识别任务,而现有硬件难以达到要求。 自动化智能机器人实验台厂家?

提升自动化智能机器人实验台性能可以从以下几个方面入手:硬件升级更新**部件:将实验台的操控器升级为运算速度更快、处理能力更强的型号,可提高对机器人的操控精度和响应速度。把电机更换为扭矩更大、转速更高、精度更高的伺服电机,能使机器人的运动更加平稳、准确。对传感器进行升级,如采用精度更高的激光雷达、视觉传感器等,以提升机器人对环境的感知能力。优化机械结构:检查并加固实验台及机器人的机械连接部位,减少运动过程中的振动和松动,提高整体的稳定性。采用更传动装置,如高精度的滚珠丝杠、同步带等,可降低传动误差,提高运动传递的准确性。根据实验需求,对机器人的机械臂、关节等结构进行优化设计,增强其负载能力和运动灵活性。 自动化智能机器人实验台的售后服务好不好呢?自动化装置自动化智能机器人实验台内容
实验台助力机器人技术走向成熟。自动化装置自动化智能机器人实验台内容
汉吉龙测控有限公司自动化智能机器人实验台在教学领域具有多方面的应用,涵盖了从基础教学到技能培养以及创新实践等多个层面,以下是具体介绍:基础课程教学机械原理与设计:通过让学生观察智能机器人实验台的机械结构,如关节连接方式、传动装置等,帮助学生理解机械原理中的杠杆、齿轮传动、连杆机构等知识。学生还可亲自拆解和组装实验台的部分机械结构,深化对机械设计和制造工艺的认识。电子电路基础:实验台的电路系统为学生提供了直观的学习对象,学生可以了解传感器电路、电机驱动电路、操控电路等的工作原理和连接方式,学习如何焊接电路、连接电子元件,掌握基本的电子电路搭建和调试技能。计算机编程基础:利用实验台的编程接口,学生可以学习基本的编程语言和编程逻辑,如Python、C++等。通过编写简单的程序机器人的运动、传感器数据采集等,让学生在实践中理解编程的概念和应用,提高编程能力。 自动化装置自动化智能机器人实验台内容
与自动化智能机器人实验台相关的文章

非标型自动化智能机器人实验台设备
- 送料设备自动化智能机器人实验台使用 2025-03-01
- 皮带输送自动化智能机器人实验台贴牌 2025-03-01
- 产线自动化智能机器人实验台厂家排名 2025-03-01
- 汉吉龙自动化智能机器人实验台图片 2025-02-28
- 实物自动化智能机器人实验台产线 2025-02-28
- 材料仓库自动化智能机器人实验台哪家好 2025-02-26
- 皮带输送自动化智能机器人实验台视频 2025-02-26
- 上料自动化智能机器人实验台批发 2025-02-26
- 自动化智能机器人实验台使用方法 2025-02-26
- 气动系统自动化智能机器人实验台哪里买 2025-02-26
- 预测性自动化智能机器人实验台使用方法 2025-02-25
- 自动化装置自动化智能机器人实验台保修 2025-02-25
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
国产自动化智能机器人实验台企业 2025-02-23 06:06:50自动化智能机器人实验台应用场景科研领域:高校和科研机构用于机器人相关的基础研究和前沿技术探索,如研究机器人的运动规划、智能算法、人机交互等,开发新的机器人操控方法和感知技术,推动机器人技术的发展。教育教学:在的自动化、机器人工程等相关教学中,作为教学实践平台,让学生通过实际操作和编程,了解机...
-
维护自动化智能机器人实验台工作原理 2025-02-22 17:06:02VALENIAN自动化智能机器人实验台数据处理与通信方面海量数据处理:实验过程中,机器人和各种传感器会产生大量数据,如高分辨率图像、实时监测数据等。对这些海量数据进行迅速采集、存储、分析和挖掘,从中提取有价值的信息,以支持实验决策和优化,需要强大的数据处理能力和数据处理算法2。实时通信可...
-
人机界面自动化智能机器人实验台写论文 2025-02-22 16:06:21机械部分清洁:定期使用干净柔软的布擦拭实验台及机器人的外壳、手臂、关节等部件,去除灰尘、油污和杂物。避免使用尖锐或硬质工具,以免刮伤表面。对于顽固污渍,可使用温和的清洁剂,但要确保清洁剂不会对设备造成腐蚀。润滑:按照设备制造商的建议,定期为实验台的机械关节、轴承、导轨等运动部件添加适量的...
-
定制自动化智能机器人实验台怎么用 2025-02-22 15:06:21自动化智能机器人实验台用于教育教学方面实践教学载体:是高校、职业院校等开展机器人相关教学的重要实践平台。学生可以通过在实验台上进行实际操作,将理论知识与实践相结合,更好地理解机器人的结构、原理和方法,提高学生的动手能力和工程实践素养。培养创新人才:为学生提供了一个自主创新和探索的空间,学...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-

昆山激光对中仪使用
2026-03-18 -

S和M联轴器对中仪
2026-03-18 -

江苏莱克舒特疏水阀检测仪
2026-03-18 -
转轴联轴器对中仪使用
2026-03-18 -
辽宁国产疏水阀检测仪
2026-03-18 -
电机激光对中仪视频
2026-03-18 -

傻瓜式百分表对中仪找正方法
2026-03-18 -
HOJOLO激光对中仪电话
2026-03-18 -

CCD百分表对中仪制造商
2026-03-18