运动操控算法可通过以下多种方式提高自动化智能机器人实验台的操作精度:误差补偿与校正方面PID操控算法:比例(P)环节能迅速根据当前误差调整操控量,使机器人迅速向目标位置靠近;积分(I)环节可累积过去的误差,稳态误差,确保机器人**终能精确到达目标位置,而不会存在残留偏差;微分(D)环节能...
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
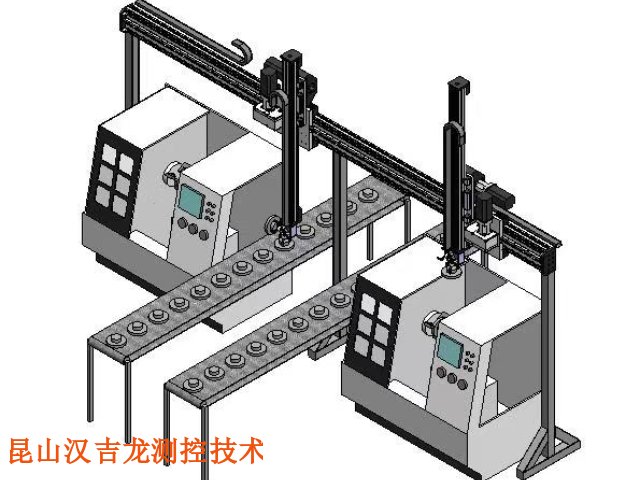
配合方式通信协议:实验台与软件之间通过特定的通信协议进行数据传输和指令交互,如TCP/IP协议、串口通信协议等。例如,通过串口通信协议,实验台可以将传感器数据发送给数据分析软件,同时接收来自编程软件的指令。应用程序接口(API):实验台通常会提供相应的API,方便软件开发者将实验台与各种软件进行集成。开发者可以调用这些API来实现对实验台的和数据采集,如通过ROS的API可以方便地实现不同软件模块与实验台的交互。中间件:一些情况下会使用中间件来实现实验台与不同软件的连接和协同工作。中间件可以对不同软件和实验台之间的通信和数据格式进行转换和适配,使它们能够更好地配合,如在工业自动化领域,OPCUA中间件常被用于连接机器人实验台与各种工业软件。自动化能为实验台添动力吗?送料设备自动化智能机器人实验台使用
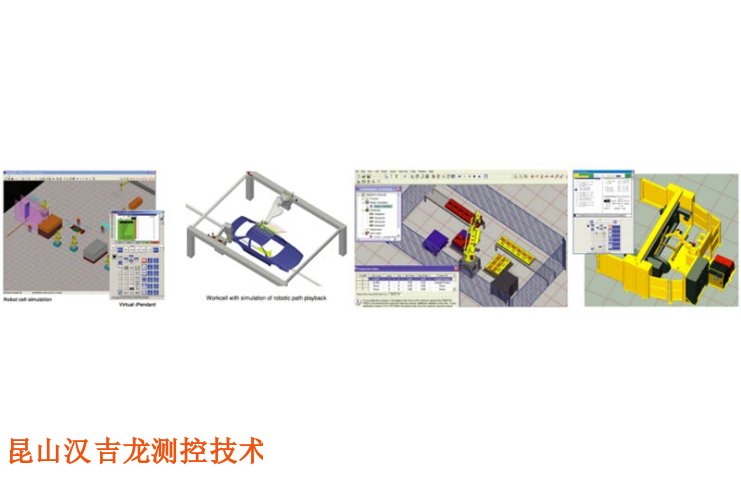
自动化智能机器人实验台的发展趋势主要体现在以下几个方面:技术层面智能化与自主化程度提升:随着人工智能、机器学习等技术的不断进步,实验台将具备更强的学习和推理能力。例如能够自主学习实验流程和规则,根据实验结果进行自我调整和优化,像美国卡内基梅隆大学开发的由GPT驱动的“机器人化学家”Coscientist系统,可自主设计、规划和执行复杂科学实验2。多技术融合:与物联网、云计算、大数据等技术深度融合。实现实验数据的实时采集、传输和分析,可远程监控和操作实验台,便于科研人员随时随地进行实验管理。还能将不同来源的数据进行整合分析,为实验提供更***的支持23。高精度与高可靠性:机械结构和系统不断优化,运动精度和精度进一步提高,确保实验操作的准确性和重复性。采用传感器和故障诊断技术,提高实验台的可靠性和稳定性,减少故障发生的概率,降低维护成本。 自动生产线自动化智能机器人实验台定制实验台的机械结构如何设计能适应不同类型机器人的安装?
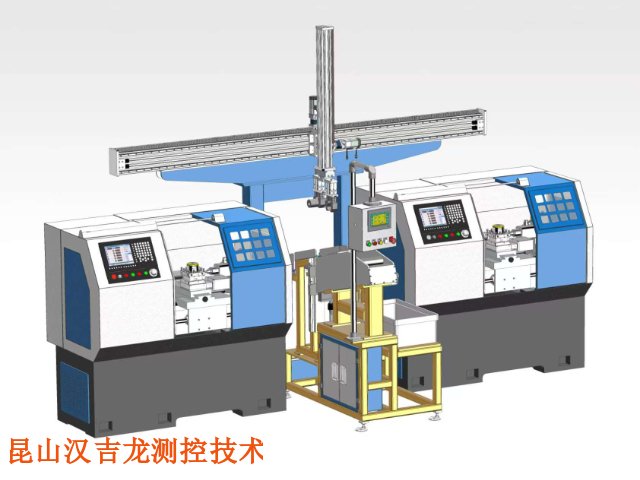
常见类型工业机器人实验台:主要模拟工业生产中的机器人应用场景,如焊接、装配、搬运等,通常具有较高的负载能力和精度,可用于研究工业机器人的控制策略和优化生产流程。服务机器人实验台:侧重于机器人在服务领域的应用,如家庭服务、酒店服务、导览服务等,注重人机交互、环境感知和自主导航等功能的研究和开发。医疗机器人实验台:针对医疗领域的需求设计,用于研究和开发手术机器人、康复机器人、护理机器人等,需要具备高精度的操作和与人体的安全交互功能。智能移动机器人实验台:以移动机器人为**,研究机器人的自主导航、路径规划、环境感知等技术,可应用于物流运输、安防监控、农业植保等领域。
汉吉龙测控有限公司自动化智能机器人实验台在教学领域具有多方面的应用,涵盖了从基础教学到技能培养以及创新实践等多个层面,以下是具体介绍:基础课程教学机械原理与设计:通过让学生观察智能机器人实验台的机械结构,如关节连接方式、传动装置等,帮助学生理解机械原理中的杠杆、齿轮传动、连杆机构等知识。学生还可亲自拆解和组装实验台的部分机械结构,深化对机械设计和制造工艺的认识。电子电路基础:实验台的电路系统为学生提供了直观的学习对象,学生可以了解传感器电路、电机驱动电路、操控电路等的工作原理和连接方式,学习如何焊接电路、连接电子元件,掌握基本的电子电路搭建和调试技能。计算机编程基础:利用实验台的编程接口,学生可以学习基本的编程语言和编程逻辑,如Python、C++等。通过编写简单的程序机器人的运动、传感器数据采集等,让学生在实践中理解编程的概念和应用,提高编程能力。 智能机器人靠实验台能蜕变吗?

自动化智能机器人实验台可适用于多种实验,涵盖运动操控、传感器、人工智能等多个领域,以下是具体介绍:运动操控相关实验轨迹实验:通过编写操控算法,让机器人沿着预设的直线、曲线等轨迹运动,检验机器人的运动精度和轨迹能力,可应用于工业生产中的物料搬运、装配等场景。步态规划实验:针对具有多足或轮式移动机构的机器人,设计不同的步态或运动模式,如四足机器人的trot步态、bound步态等,研究机器人在不同地形和任务下的比较好运动方式,为机器人在复杂环境下的移动提供技术支持。关节操控实验:对机器人的各个关节进行单独或协同操控,测试关节的运动范围、速度、扭矩等性能指标,优化关节操控算法,提高机器人的操作灵活性和准确性,常用于机器人手臂的抓取、放置等操作任务。智能机器人因实验台能突破吗?送料设备自动化智能机器人实验台使用
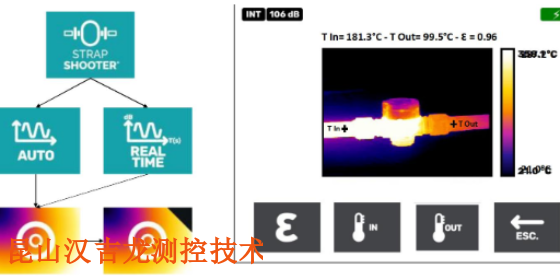
分析自动化智能机器人实验台的数据十分关键。送料设备自动化智能机器人实验台使用
自动化智能机器人实验台参考算法性能与可解释性算法性能:通过在实验台上进行算法测试,比较不同算法在准确性、精度、召回率等指标上的表现。例如在故障诊断任务中,对比神经网络算法和支持向量机算法的故障识别准确率和误报率,选择性能更优的算法。可解释性:在一些对解释性要求较高的场景,如工业生产中的关键机器人系统,需要选择可解释性强的算法,如基于规则的算法、决策树算法,以便工程师理解和解释算法的决策过程,迅速问题和进行系统优化。而对于一些对可解释性要求不高,只追求性能的场景,如某些智能安防机器人的图像识别任务,深度学习算法虽然可解释性差,但性能优越,也可被选用。结合过往经验与行业标准经验借鉴:参考相关领域的研究成果和实践经验,了解其他类似机器人实验台所采用的数据分析算法。比如在物流机器人领域,若已有成功案例采用了某种特定算法进行路径规划和优化,可考虑借鉴并根据自身实验台特点进行改进。行业标准:某些行业对机器人的数据分析有特定的标准和规范要求,例如汽车制造行业中机器人的质量检测和,需要遵循相关的行业标准和规范,选择符合标准的算法进行数据分析,确保机器人的性能和质量符合行业要求。 送料设备自动化智能机器人实验台使用
与自动化智能机器人实验台相关的文章

非标型自动化智能机器人实验台设备
- 送料设备自动化智能机器人实验台使用 2025-03-01
- 皮带输送自动化智能机器人实验台贴牌 2025-03-01
- 产线自动化智能机器人实验台厂家排名 2025-03-01
- 汉吉龙自动化智能机器人实验台图片 2025-02-28
- 实物自动化智能机器人实验台产线 2025-02-28
- 材料仓库自动化智能机器人实验台哪家好 2025-02-26
- 皮带输送自动化智能机器人实验台视频 2025-02-26
- 上料自动化智能机器人实验台批发 2025-02-26
- 自动化智能机器人实验台使用方法 2025-02-26
- 气动系统自动化智能机器人实验台哪里买 2025-02-26
- 预测性自动化智能机器人实验台使用方法 2025-02-25
- 自动化装置自动化智能机器人实验台保修 2025-02-25
与自动化智能机器人实验台相关的产品


与自动化智能机器人实验台相关的新闻
-
国产自动化智能机器人实验台企业 2025-02-23 06:06:50自动化智能机器人实验台应用场景科研领域:高校和科研机构用于机器人相关的基础研究和前沿技术探索,如研究机器人的运动规划、智能算法、人机交互等,开发新的机器人操控方法和感知技术,推动机器人技术的发展。教育教学:在的自动化、机器人工程等相关教学中,作为教学实践平台,让学生通过实际操作和编程,了解机...
-
维护自动化智能机器人实验台工作原理 2025-02-22 17:06:02VALENIAN自动化智能机器人实验台数据处理与通信方面海量数据处理:实验过程中,机器人和各种传感器会产生大量数据,如高分辨率图像、实时监测数据等。对这些海量数据进行迅速采集、存储、分析和挖掘,从中提取有价值的信息,以支持实验决策和优化,需要强大的数据处理能力和数据处理算法2。实时通信可...
-
人机界面自动化智能机器人实验台写论文 2025-02-22 16:06:21机械部分清洁:定期使用干净柔软的布擦拭实验台及机器人的外壳、手臂、关节等部件,去除灰尘、油污和杂物。避免使用尖锐或硬质工具,以免刮伤表面。对于顽固污渍,可使用温和的清洁剂,但要确保清洁剂不会对设备造成腐蚀。润滑:按照设备制造商的建议,定期为实验台的机械关节、轴承、导轨等运动部件添加适量的...
-
定制自动化智能机器人实验台怎么用 2025-02-22 15:06:21自动化智能机器人实验台用于教育教学方面实践教学载体:是高校、职业院校等开展机器人相关教学的重要实践平台。学生可以通过在实验台上进行实际操作,将理论知识与实践相结合,更好地理解机器人的结构、原理和方法,提高学生的动手能力和工程实践素养。培养创新人才:为学生提供了一个自主创新和探索的空间,学...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-

经济型镭射主轴对准仪写论文
2026-03-19 -
贵州浮球式疏水阀检测仪
2026-03-19 -

新一代联轴器对中仪厂家
2026-03-19 -

湖南振动激光对中仪
2026-03-18 -

昆山激光对中仪使用
2026-03-18 -

S和M联轴器对中仪
2026-03-18 -

江苏莱克舒特疏水阀检测仪
2026-03-18 -
转轴联轴器对中仪使用
2026-03-18 -
辽宁国产疏水阀检测仪
2026-03-18