运动操控算法可通过以下多种方式提高自动化智能机器人实验台的操作精度:误差补偿与校正方面PID操控算法:比例(P)环节能迅速根据当前误差调整操控量,使机器人迅速向目标位置靠近;积分(I)环节可累积过去的误差,稳态误差,确保机器人**终能精确到达目标位置,而不会存在残留偏差;微分(D)环节能...
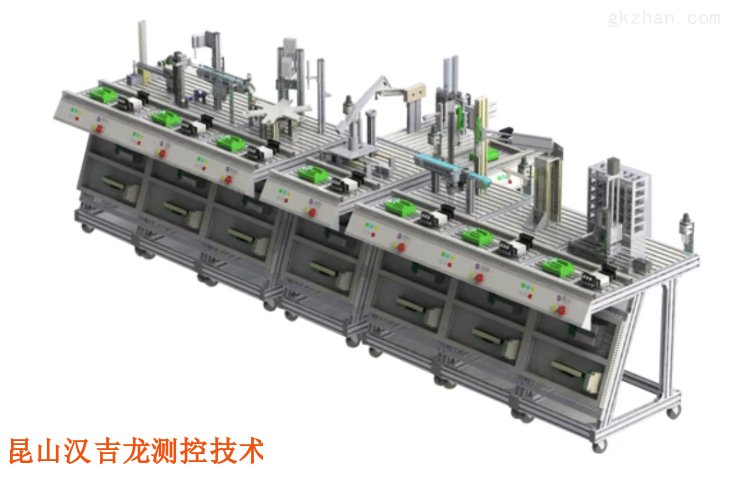
自动化智能机器人实验台基本参数
- 品牌
- VALENIAN/瓦伦尼安
- 型号
- VT-ZP500
- 类型
- 自动化实训台
- 加工定制
- 是
- 用途
- 教学实训
- 电机功率
- 2
- 外形尺寸
- 1200X1000X1500
- 重量
- 10
- 产地
- 苏州
- 厂家
- 昆山汉吉龙测控技术有限公司
自动化智能机器人实验台企业商机
自动化智能机器人实验台的能耗大小取决于多种因素,以下是具体分析:硬件配置方面电机功率:实验台若配备大功率的电机来驱动机器人的运动,如一些用于工业模拟的重型机器人实验台,其电机可能需要几十千瓦的功率来实现高精度、高负载的运动,能耗相对较大。而小型的教育类机器人实验台,电机功率可能*为几瓦到几十瓦,能耗较低。传感器数量与类型:若实验台上的机器人搭载了大量高能耗的传感器,如激光雷达、高精度摄像头等,且这些传感器需要长时间持续工作,会增加整体能耗。以一款配备3D激光雷达的机器人实验台为例,其激光雷达功率一般在10-30瓦左右,再加上其他传感器和器的能耗,整体能耗会较为明显。相比之下,*配备简单光电传感器的实验台能耗则要小得多。计算设备:如果实验台需要进行大量的数据处理和复杂的算法运算,配备了高性能的CPU、GPU等计算设备,这些设备的功耗通常较高。例如一些用于人工智能研究的实验台,其高性能GPU的功耗可能达到几百瓦,会使实验台的整体能耗大幅增加。自动化智能机器人实验台很好。实物自动化智能机器人实验台产线
多传感器融合与反馈方面基于视觉反馈的操控算法:利用视觉传感器获取机器人当前的位置、姿态以及周围环境信息,与目标状态进行对比,然后根据偏差调整机器人的运动。视觉反馈能提供丰富的环境信息,使机器人能够实时感知并避开障碍物,精确地对准目标,常用于需要高精度操作的实验场景。多传感器融合操控算法:将多种传感器(如视觉、力觉、惯性传感器等)的数据进行融合处理,综合利用各传感器的优势,为运动操控算法提供更***、准确的信息。例如,力觉传感器可用于精确操控机器人与物体的接触力,在进行装配、抓取等操作时,结合视觉和力觉反馈的操控算法能使机器人更精确地完成任务,提高操作的准确性和成功率。提高实验台在不同工况下的可靠性和准确性。实物自动化智能机器人实验台产线自动化智能机器人实验台厂家?

依据数据特点数据类型:如果是数值型数据,像传感器采集的温度、压力、速度等数据,可选择数值计算类算法,如均值滤波、卡尔曼滤波用于数据处理,回归分析用于预测。若是图像、视频等非结构化数据,就需要采用如卷积神经网络等专门处理此类数据的算法进行特征提取和分析。数据量:对于少量数据,简单的统计分析算法、基于规则的算法可能就足够,如通过设定阈值判断机器人状态是否异常。当数据量庞大时,像深度学习算法中的循环神经网络(RNN)及其变体LSTM等,能利用大量数据进行训练学习,挖掘数据中的复杂模式和规律。数据噪声:若数据噪声较大,需要先采用滤波算法进行去噪,如中值滤波、小波滤波等。对于存在随机噪声且具有动态特性的数据,卡尔曼滤波能滤除噪声,实现对机器人状态的准确估计。
自动化智能机器人实验台可适用于多种实验,涵盖运动操控、传感器、人工智能等多个领域,以下是具体介绍:运动操控相关实验轨迹实验:通过编写操控算法,让机器人沿着预设的直线、曲线等轨迹运动,检验机器人的运动精度和轨迹能力,可应用于工业生产中的物料搬运、装配等场景。步态规划实验:针对具有多足或轮式移动机构的机器人,设计不同的步态或运动模式,如四足机器人的trot步态、bound步态等,研究机器人在不同地形和任务下的比较好运动方式,为机器人在复杂环境下的移动提供技术支持。关节操控实验:对机器人的各个关节进行单独或协同操控,测试关节的运动范围、速度、扭矩等性能指标,优化关节操控算法,提高机器人的操作灵活性和准确性,常用于机器人手臂的抓取、放置等操作任务。自动化智能机器人实验台能耗大吗?
瓦伦尼安教学设备有限公司自动化智能机器人实验台传感器相关实验传感器性能测试实验:对机器人搭载的各类传感器,如摄像头、激光雷达、力传感器等进行性能测试,包括测量传感器的精度、分辨率、响应时间、测量范围等指标,评估传感器是否满足机器人的应用需求。传感器融合实验:将多种传感器的数据进行融合处理,如将视觉传感器和激光雷达的数据融合,利用不同传感器的优势,提高机器人对环境的感知能力和信息获取的准确性,用于机器人的自主导航系统、目标识别等任务。环境感知实验:利用传感器让机器人感知周围环境的信息,如障碍物检测、地形识别、目标物体等,研究机器人在不同环境下的感知策略和算法,使机器人能够适应复杂多变的环境。 自动化智能机器人实验台能否模拟不同行业的特殊作业需求?材料仓库自动化智能机器人实验台定做
自动化智能机器人实验台能兼容其他设备吗?实物自动化智能机器人实验台产线
自动化智能机器人实验台参考算法性能与可解释性算法性能:通过在实验台上进行算法测试,比较不同算法在准确性、精度、召回率等指标上的表现。例如在故障诊断任务中,对比神经网络算法和支持向量机算法的故障识别准确率和误报率,选择性能更优的算法。可解释性:在一些对解释性要求较高的场景,如工业生产中的关键机器人系统,需要选择可解释性强的算法,如基于规则的算法、决策树算法,以便工程师理解和解释算法的决策过程,迅速问题和进行系统优化。而对于一些对可解释性要求不高,只追求性能的场景,如某些智能安防机器人的图像识别任务,深度学习算法虽然可解释性差,但性能优越,也可被选用。结合过往经验与行业标准经验借鉴:参考相关领域的研究成果和实践经验,了解其他类似机器人实验台所采用的数据分析算法。比如在物流机器人领域,若已有成功案例采用了某种特定算法进行路径规划和优化,可考虑借鉴并根据自身实验台特点进行改进。行业标准:某些行业对机器人的数据分析有特定的标准和规范要求,例如汽车制造行业中机器人的质量检测和,需要遵循相关的行业标准和规范,选择符合标准的算法进行数据分析,确保机器人的性能和质量符合行业要求。 实物自动化智能机器人实验台产线
与自动化智能机器人实验台相关的文章

非标型自动化智能机器人实验台设备
- 送料设备自动化智能机器人实验台使用 2025-03-01
- 皮带输送自动化智能机器人实验台贴牌 2025-03-01
- 产线自动化智能机器人实验台厂家排名 2025-03-01
- 汉吉龙自动化智能机器人实验台图片 2025-02-28
- 实物自动化智能机器人实验台产线 2025-02-28
- 材料仓库自动化智能机器人实验台哪家好 2025-02-26
- 皮带输送自动化智能机器人实验台视频 2025-02-26
- 上料自动化智能机器人实验台批发 2025-02-26
- 自动化智能机器人实验台使用方法 2025-02-26
- 气动系统自动化智能机器人实验台哪里买 2025-02-26
- 预测性自动化智能机器人实验台使用方法 2025-02-25
- 自动化装置自动化智能机器人实验台保修 2025-02-25
与自动化智能机器人实验台相关的产品



与自动化智能机器人实验台相关的新闻
-
国产自动化智能机器人实验台企业 2025-02-23 06:06:50自动化智能机器人实验台应用场景科研领域:高校和科研机构用于机器人相关的基础研究和前沿技术探索,如研究机器人的运动规划、智能算法、人机交互等,开发新的机器人操控方法和感知技术,推动机器人技术的发展。教育教学:在的自动化、机器人工程等相关教学中,作为教学实践平台,让学生通过实际操作和编程,了解机...
-
维护自动化智能机器人实验台工作原理 2025-02-22 17:06:02VALENIAN自动化智能机器人实验台数据处理与通信方面海量数据处理:实验过程中,机器人和各种传感器会产生大量数据,如高分辨率图像、实时监测数据等。对这些海量数据进行迅速采集、存储、分析和挖掘,从中提取有价值的信息,以支持实验决策和优化,需要强大的数据处理能力和数据处理算法2。实时通信可...
-
人机界面自动化智能机器人实验台写论文 2025-02-22 16:06:21机械部分清洁:定期使用干净柔软的布擦拭实验台及机器人的外壳、手臂、关节等部件,去除灰尘、油污和杂物。避免使用尖锐或硬质工具,以免刮伤表面。对于顽固污渍,可使用温和的清洁剂,但要确保清洁剂不会对设备造成腐蚀。润滑:按照设备制造商的建议,定期为实验台的机械关节、轴承、导轨等运动部件添加适量的...
-
定制自动化智能机器人实验台怎么用 2025-02-22 15:06:21自动化智能机器人实验台用于教育教学方面实践教学载体:是高校、职业院校等开展机器人相关教学的重要实践平台。学生可以通过在实验台上进行实际操作,将理论知识与实践相结合,更好地理解机器人的结构、原理和方法,提高学生的动手能力和工程实践素养。培养创新人才:为学生提供了一个自主创新和探索的空间,学...
与自动化智能机器人实验台相关的问题
新闻资讯
产品推荐
-

经济型镭射主轴对准仪写论文
2026-03-19 -
贵州浮球式疏水阀检测仪
2026-03-19 -

新一代联轴器对中仪厂家
2026-03-19 -

湖南振动激光对中仪
2026-03-18 -

昆山激光对中仪使用
2026-03-18 -

S和M联轴器对中仪
2026-03-18 -

江苏莱克舒特疏水阀检测仪
2026-03-18 -
转轴联轴器对中仪使用
2026-03-18 -
辽宁国产疏水阀检测仪
2026-03-18